Sigue-lineas
El sigue-lineas son dos sensores que están colocados debajo del robot
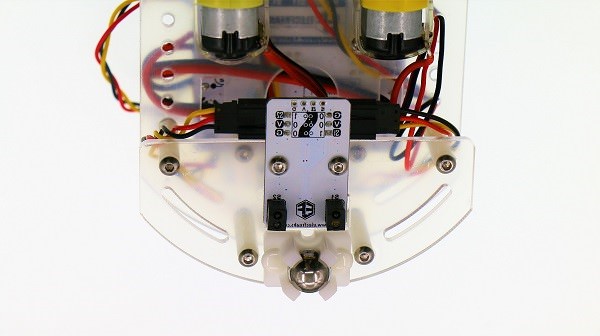
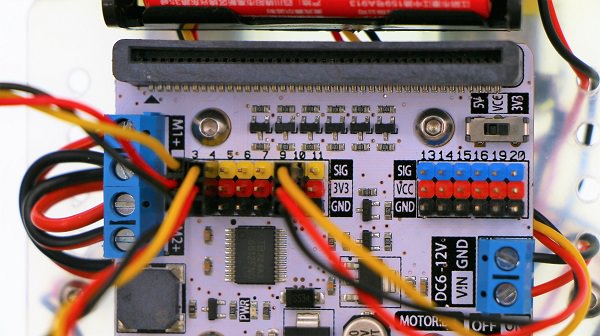
Por unificar criterios, los conectaremos en P3 y P4
Cada sensor tiene dos leds, uno emisor y otro receptor. El receptor recoge la luz reflejada, si hay debajo algo que no refleja la luz (por ejemlo una línea negra) entonces manda OFF en caso contrario ON
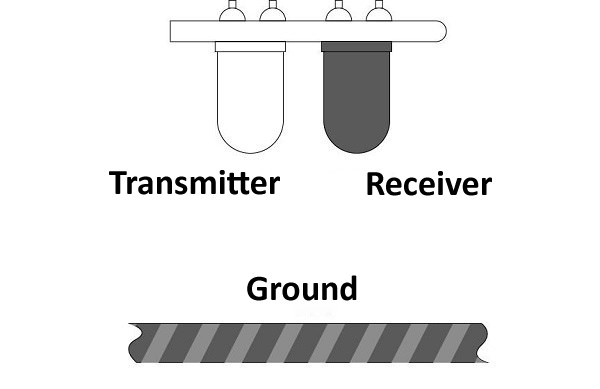
OJO VA AL REVÉS es decir * cuando hay linea negra es OFF * cuando no hay linea es ON
por lo tanto queremos:
- Que cuando sea OFF sea un 1 lógico (línea)
- Que cuando sea ON sea un 0 lógico (no hay línea)
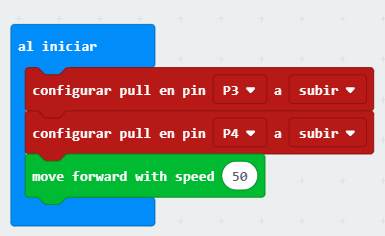
Esto se llama CONFIGURACIÓN PULL-UP (pincha aquí para saber más) luego lo primero que tenemos que hacer es configurar estos sensores como PULL-UP con estas instrucciones (han traducido UP como subir):
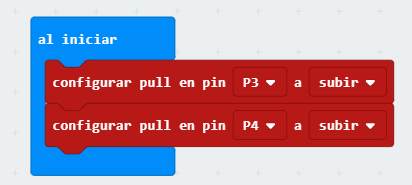
Están un poco escondidas:

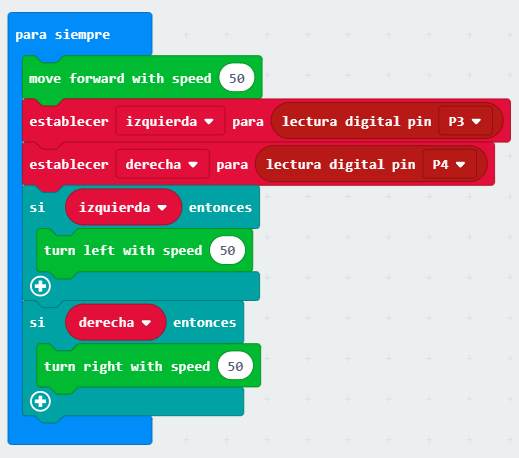
Y luego crear unas variables por ejemplo izquierda y derecha dentro del bucle que lean esos sensores. El resto del código sólo utilizaremos estas variables:

Reto 4 Seguir la línea
Otro reto que pide a gritos este sensor:
Consejo: en clase, antes de atacar con este reto, aconsejamos otro más sencillo como que el robot se mueva y si encuentra línea que se pare, este reto lo puedes ver aquí
Descripción del programa
Al empezar configuraremos los sensores en PULL-UP tal y como hemos explicado:
Luego entramos en el bucle donde simplemente dice:
- Sigue hacia delante
- Si te desvías hacia la derecha gira a la izquierda
- Si te desvías hacia la izquierda gira a la derecha
El programa tiene la pega que si aumentamos la velocidad, pierde la línea.
Evidentemente hay muchas versiones y mejoras, por ejemplo aquí pero ésta https://makecode.microbit.org/_U3VP8JhVTXaJ es desde luego la versión más sencilla.