SmartCar
Micro:BIT se queda un poco triste si no se "mueve", pero hay que tener en cuenta que en la robótica el movimiento se paga:
- Adición de motores, chasis, ruedas...
- Necesitas una electrónica añadida de potencia y control de los motores.
- Necesitas unos sensores de lo contrario el movimiento se queda insípido sin reacción al mundo exterior.
La placa de micro:BIT no incorpora movimiento, por eso cuesta tan poco, pero si quieres este extra tienes que pagar (casi el doble de lo que cuesta micro:BIT). Aún así el conjunto sale más barato que mBot.
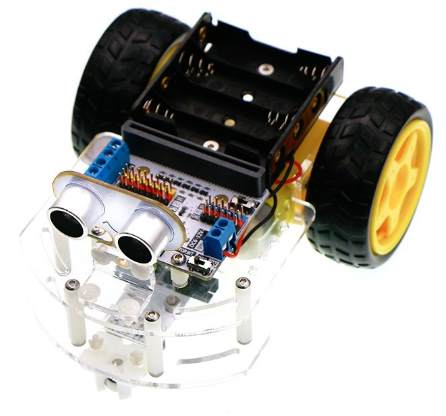
Este kit viene con sensor de ultrasonidos, sensor de sigue-lineas y la placa motorbit que se inserta la micro:BIT además de tener altavóz y salidas a puertos por si se quiere añadir servos por ejemplo. Para más información de esta placa consultar esta web.
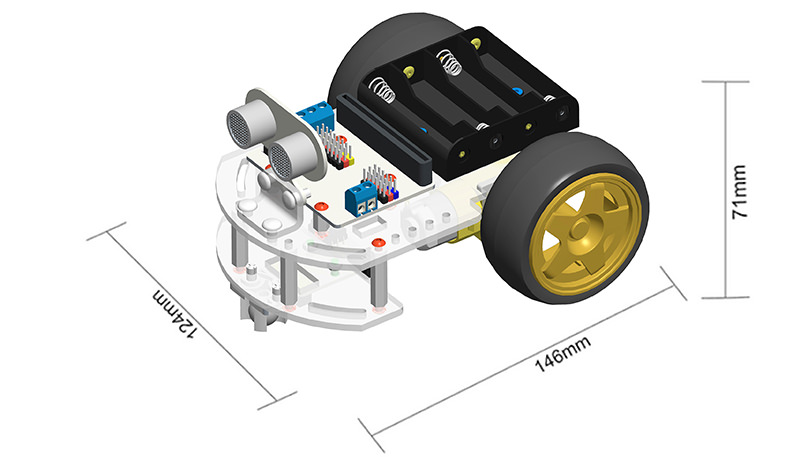
Montaje
El paquete viene con unas piezas listas para montar que no requieren especial destreza DYC, lo único "difícil" es que hay que soldar los cables a los motores (4 pequeñas soldaduras).
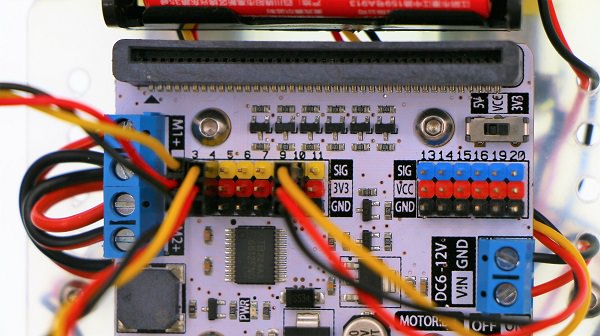
El sensor sigue-lineas y el sensor ultrasonidos se puede poner en cualquier pin, pero en este curso lo fijaremos en:
- Sensor ultrasonidos en el PIN 10
- Sensor siguelíneas izquierda en el PIN3
- Sensor siguelíneas derecha en el PIN4
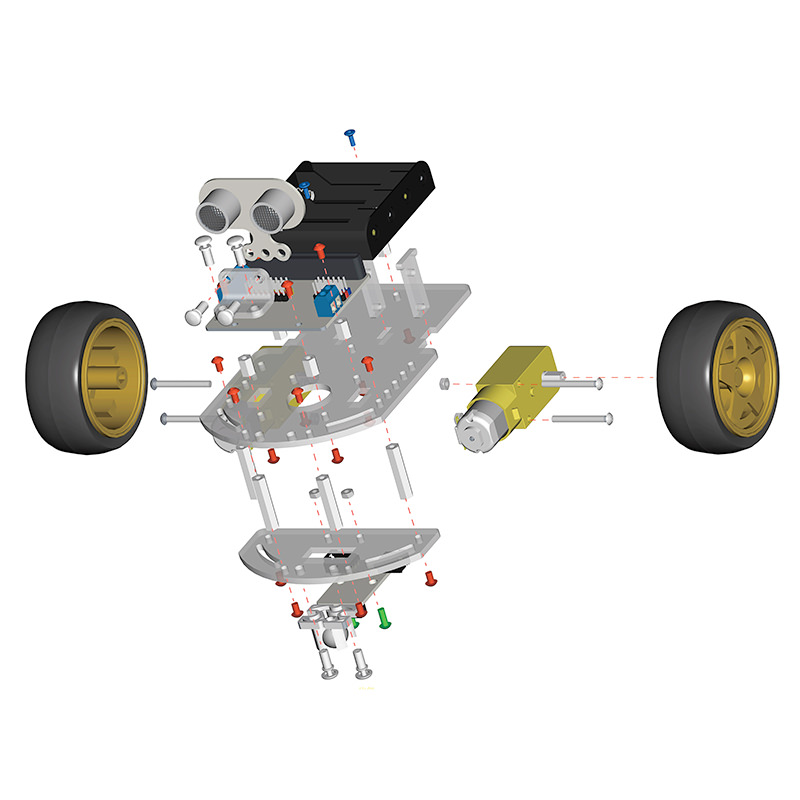
Con un poco de paciencia se hace muy bien
Nosotros no somos comerciales, luego ésto mejor que no :
Conexión con Makecode
Para tener las instrucciones específicas, hay que entrar en Makecode https://makecode.microbit.org/#editor entrar en AVANZADO en EXTENSIONES y buscar la extensión MOTORBIT instalar, y ya está tenemos instalado las funciones específicas de este coche:
No comments to display
No comments to display