Componentes
Puedes consultar los enlaces a todos los componentes en esta web
Hay muchas versiones, nos vamos a centrar en la versión DIY - Brivoi Audacius
En este apartado veremos todos los componentes explicando de manera simple su funcionamiento, eso te permitirá solucionar cualquier problema que vaya surgiendo.
No te asustes, no entraremos en detalles técnicos.

- Piezas impresas 3D
- Placa botonera
- Arduino Nano
- Motores paso a paso 28BJ J-48
- Drivers ULN 2003
- Protoboard 170 puntos
- Buzzer 5V
- Portapilas 4 unidades AA
- Cables arduino macho-hembra
- Canica 14 mm
- Tornillería y tuercas
Piezas impresas 3D
Sostienen el resto de componentes y conforman el chasis del robot, se pueden imprimir en diferentes materiales. El más utilizado suele ser un plástico llamado PLA por ser el más económico y simple de imprimir, con una altura de capa entre 0.2 y 0.3 mm. AingeruJM nos reporta el consejo de Rafa Couto:
"Cono relleno 20%, 2 contornos, 3 capas inferiores y superiores debería quedarte bien sin esfuerzo en la mayoría de las impresoras."
En una de la columna aparece "nombre del archivo .stl" es el tipo de formato que utilizan los programas de las impresoras 3D para poder leer e imprimir la pieza, si pinchas encima puedes descargar el archivo.
Piezas exclusivas de la versión DIY
| Nombre del archivo .stl | Descripción | Imagen |
| :--- | :--- | :--- |
| PCBAddon-KeypadBracket-5Buttons.stl | Sujeción placa botonera | 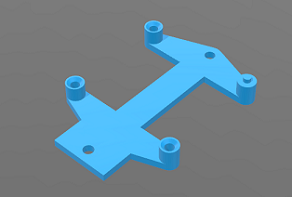 |
| board-bracket.stl | Sujeción protoboard 170 puntos |
|
| board-bracket.stl | Sujeción protoboard 170 puntos |  |
|
Piezas comunes con otras versiones
| Nombre del archivo .stl | Descripción | Imagen |
| :--- | :--- | :--- |
| ballcaster-v2.stl | Sujeción bola v2 | 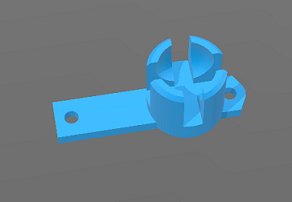 |
| battery-bracket.stl | Sujeción batería o portapilas AA |
|
| battery-bracket.stl | Sujeción batería o portapilas AA | 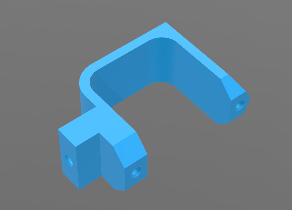 |
| MotorBracket.stl | Sujeción motores |
|
| MotorBracket.stl | Sujeción motores | 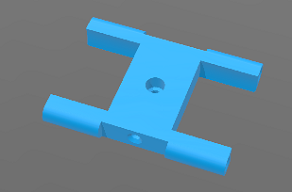 |
| wheel-l.stl | Rueda Izquierda |
|
| wheel-l.stl | Rueda Izquierda |  |
| wheel-r.stl | Rueda derecha |
|
| wheel-r.stl | Rueda derecha |  |
|
Placa Botonera

Incorpora los botones de acción y es la encargada de transmitir las órdenes de los movimientos al cerebro (placa Arduino Nano)
A través de los tres pines acodados GND, Sig y 5V (los tres pinchos de la perte superior derecha de la imagen) se conecta a la protoboard (la veremos más abajo)
Si miramos uno a uno sus componentes:
| Unidades | Componentes | | :--- | :--- | | 1 | PCB Diseñada por XDeSIG | | 5 | Resistencias cerámicas 10k 1/4W 5% | | 1 | Resistencia cerámica 22k 1/4W 5% | | 5 | Pulsadores 12x12x7.3 con carcasas de colores | | 3 | Pines acodados |
Tienes una guía de soldadura, con cada uno de los pasos a seguir para ensamblar los componentes.
Arduino NANO
Es el cerebro del robot y donde cargaremos nuestro código a través de una conexión Micro o Mini-USB para conectarlo a nuestro ordenador.
Tiene dos filas de pinchos o patillas soldados en cada lateral y lo pondremos sobre la protoboard.
Cada pincho esta conetado a un PIN que viene marcado con un nombre concreto y tiene una función concreta.. En esta imagen, sacada de la web de Luis Llamas puedes ver la correspondencia:
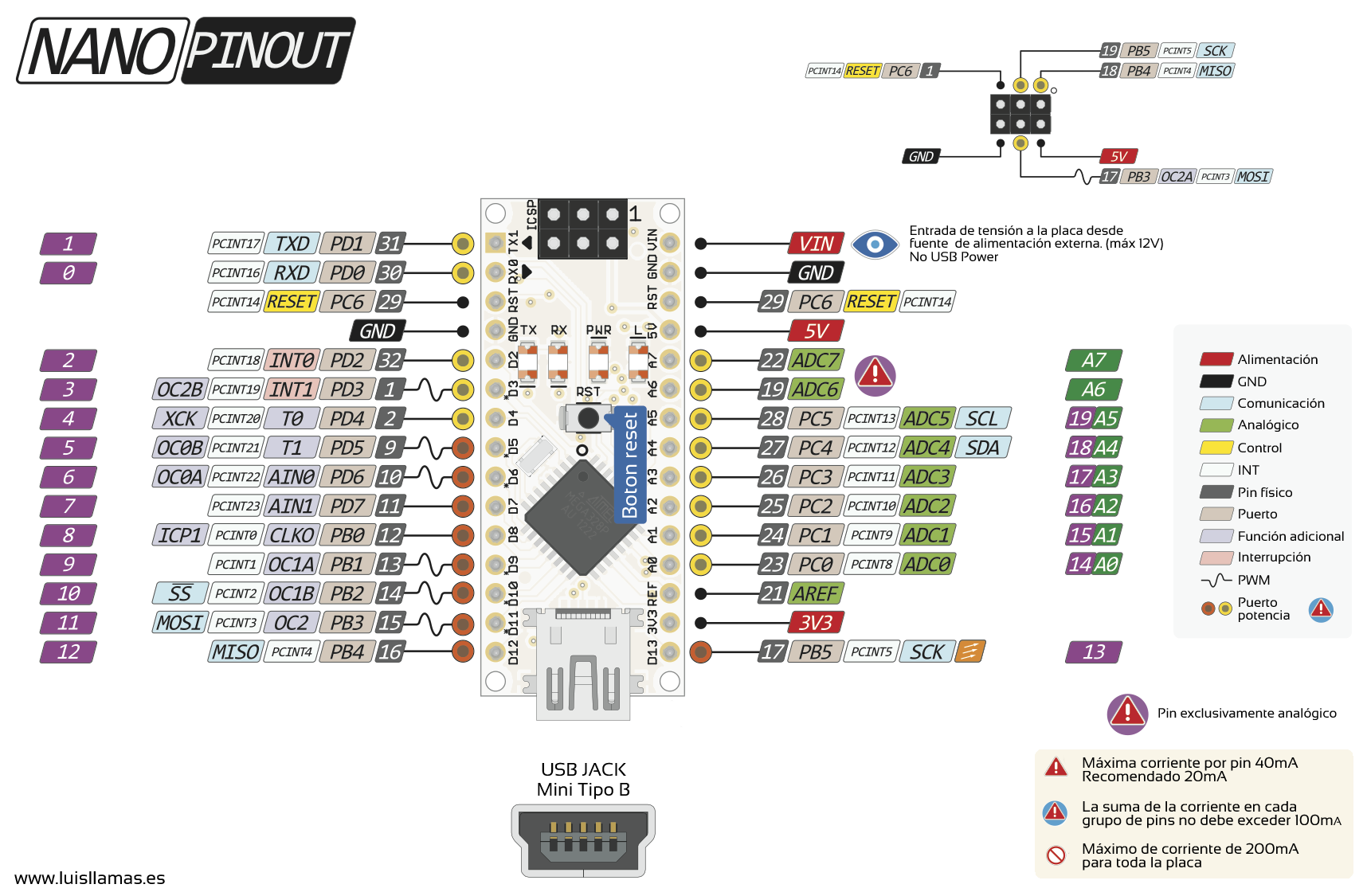
¿Qué necesitas saber?
No hace falta comprender el funcionamiento completo de la placa, con entender porque vamos a utilizar los pines donde conectaremos Escornabot es suficiente. Si alguien tiene interés en adquirir conocimiento extra, durante el curso tendrá enlaces a páginas web donde poder conseguirlo.
Placa botonera
Utilizaremos tres cables (también llamados hilos), aunque con dos sería suficiente:
| PIN Arduino NANO | ¿Por qué? | | :--- | :--- | | 5V | 5V - Alimentar la placa botonera | | A4 | Sig - Transmitir las ordenes de los botones a la placa Arduino NANO para que luego esta de las ordenes a los motores. | | GND | GND - Aunque no es correcto del todo lo llamaremos tierra o masa que es un término más conocido. |
Porta Pilas
| PIN Arduino NANO | ¿Por qué? | | :--- | :--- | | VIN | El portapilas contiene 4 pilas de 1,5 V así que la entrada de corriente será de 6V y este es el único PIN que admite corriente desde 6V a 12V. | | GND | Tierra o masa |
Drivers ULN2003
| PIN Arduino NANO | ¿Por qué? | | :--- | :--- | | VIN | En esta placa van conectados los motores y necesitaremos conectarlo a este pin para poder coger corriente del Porta Pilas que conectaremos justo encima de los dos cables de corriente de los drivers. | | GND | Tierra o masa | | D9, D8, D7, D6 (en algunas placas 9, 8, 7, 6) | Conexión del motor izquierdo al Arduino Nano para poder recibir las ordenes de los movimientos y transmitirlas posteriormente al motor. | | D5, D4, D3, D2 (en algunas placas 5, 4, 3, 2) | Conexión del motor derecho al Arduino Nano para poder rescibir las ordenes de los movimientos y transmitirlas posteriormente al motor. |
Buzzer 5V
| PIN Arduino NANO | ¿Por qué? | | :--- | :--- | | D10 (en algunas placas 10) | Para poder recibir las ordenes del Arduino NANO y ejecutar los pitidos según las pulsaciones de los botones. | | GND | Tierra o masa |