Componentes
Puedes consultar los enlaces a todos los componentes en esta web
Hay muchas versiones, nos vamos a centrar en la versión DIY - Brivoi Audacius
En este apartado veremos todos los componentes explicando de manera simple su funcionamiento, eso te permitirá solucionar cualquier problema que vaya surgiendo.
No te asustes, no entraremos en detalles técnicos.

- Piezas impresas 3D
- Placa botonera
- Arduino Nano
- Motores paso a paso 28BJ J-48
- Drivers ULN 2003
- Protoboard 170 puntos
- Buzzer 5V
- Portapilas 4 unidades AA
- Cables arduino macho-hembra
- Canica 14 mm
- Tornillería y tuercas
Piezas impresas 3D
Sostienen el resto de componentes y conforman el chasis del robot, se pueden imprimir en diferentes materiales. El más utilizado suele ser un plástico llamado PLA por ser el más económico y simple de imprimir, con una altura de capa entre 0.2 y 0.3 mm. AingeruJM nos reporta el consejo de Rafa Couto:
"Cono relleno 20%, 2 contornos, 3 capas inferiores y superiores debería quedarte bien sin esfuerzo en la mayoría de las impresoras."
En una de la columna aparece "nombre del archivo .stl" es el tipo de formato que utilizan los programas de las impresoras 3D para poder leer e imprimir la pieza, si pinchas encima puedes descargar el archivo.
Piezas exclusivas de la versión DIY
| Nombre del archivo .stl | Descripción | Imagen |
| :--- | :--- | :--- |
| PCBAddon-KeypadBracket-5Buttons.stl | Sujeción placa botonera | 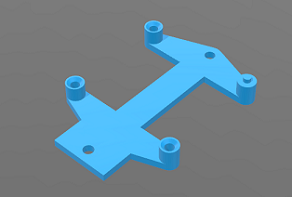 |
| board-bracket.stl | Sujeción protoboard 170 puntos |
|
| board-bracket.stl | Sujeción protoboard 170 puntos |  |
|
Piezas comunes con otras versiones
| Nombre del archivo .stl | Descripción | Imagen |
| :--- | :--- | :--- |
| ballcaster-v2.stl | Sujeción bola v2 | 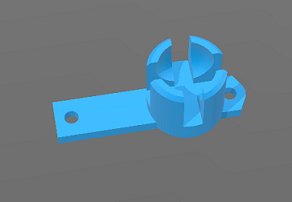 |
| battery-bracket.stl | Sujeción batería o portapilas AA |
|
| battery-bracket.stl | Sujeción batería o portapilas AA | 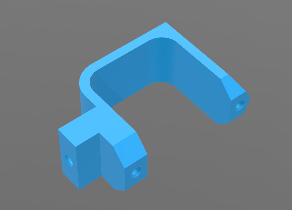 |
| MotorBracket.stl | Sujeción motores |
|
| MotorBracket.stl | Sujeción motores | 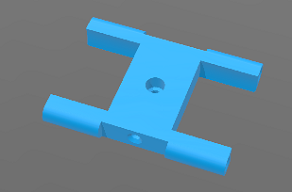 |
| wheel-l.stl | Rueda Izquierda |
|
| wheel-l.stl | Rueda Izquierda |  |
| wheel-r.stl | Rueda derecha |
|
| wheel-r.stl | Rueda derecha |  |
|
Placa Botonera

Incorpora los botones de acción y es la encargada de transmitir las órdenes de los movimientos al cerebro (placa Arduino Nano)
A través de los tres pines acodados GND, Sig y 5V (los tres pinchos de la perte superior derecha de la imagen) se conecta a la protoboard (la veremos más abajo)
Si miramos uno a uno sus componentes:
| Unidades | Componentes | | :--- | :--- | | 1 | PCB Diseñada por XDeSIG | | 5 | Resistencias cerámicas 10k 1/4W 5% | | 1 | Resistencia cerámica 22k 1/4W 5% | | 5 | Pulsadores 12x12x7.3 con carcasas de colores | | 3 | Pines acodados |
Tienes una guía de soldadura, con cada uno de los pasos a seguir para ensamblar los componentes.
Arduino NANO
Es el cerebro del robot y donde cargaremos nuestro código a través de una conexión Micro o Mini-USB para conectarlo a nuestro ordenador.
Tiene dos filas de pinchos o patillas soldados en cada lateral y lo pondremos sobre la protoboard.
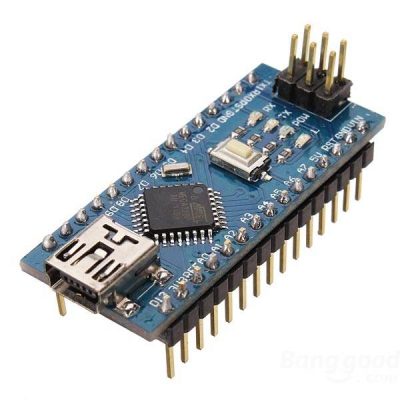
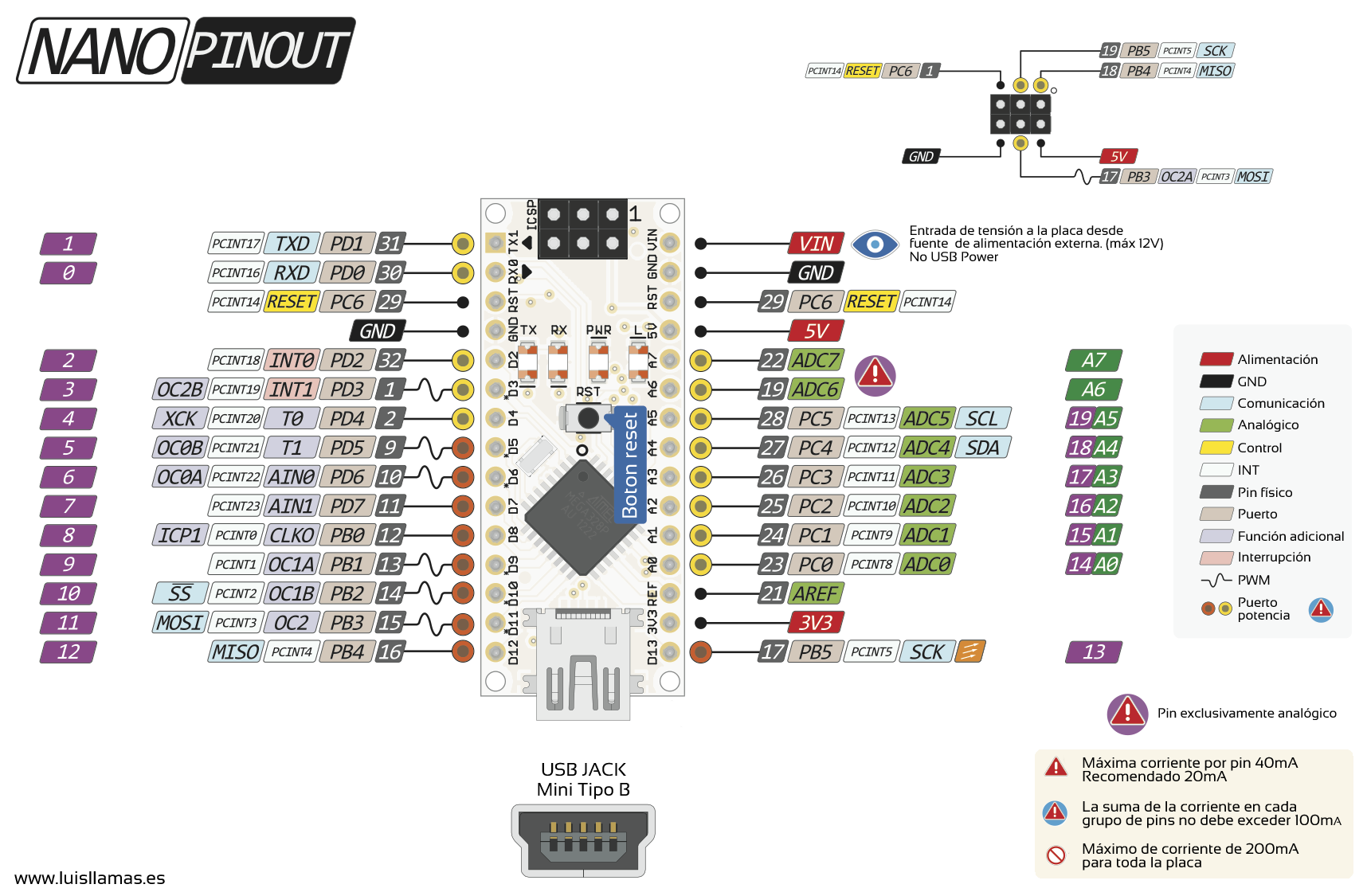
Cada pincho esta conetado a un PIN que viene marcado con un nombre concreto y tiene una función concreta.. En esta imagen, sacada de la web de Luis Llamas puedes ver la correspondencia:
¿Qué necesitas saber?
No hace falta comprender el funcionamiento completo de la placa, con entender porque vamos a utilizar los pines donde conectaremos Escornabot es suficiente. Si alguien tiene interés en adquirir conocimiento extra, durante el curso tendrá enlaces a páginas web donde poder conseguirlo.
Placa botonera
Utilizaremos tres cables (también llamados hilos), aunque con dos sería suficiente:
| PIN Arduino NANO | ¿Por qué? | | :--- | :--- | | 5V | 5V - Alimentar la placa botonera | | A4 | Sig - Transmitir las ordenes de los botones a la placa Arduino NANO para que luego esta de las ordenes a los motores. | | GND | GND - Aunque no es correcto del todo lo llamaremos tierra o masa que es un término más conocido. |
Porta Pilas
| PIN Arduino NANO | ¿Por qué? | | :--- | :--- | | VIN | El portapilas contiene 4 pilas de 1,5 V así que la entrada de corriente será de 6V y este es el único PIN que admite corriente desde 6V a 12V. | | GND | Tierra o masa |
Drivers ULN2003
| PIN Arduino NANO | ¿Por qué? | | :--- | :--- | | VIN | En esta placa van conectados los motores y necesitaremos conectarlo a este pin para poder coger corriente del Porta Pilas que conectaremos justo encima de los dos cables de corriente de los drivers. | | GND | Tierra o masa | | D9, D8, D7, D6 (en algunas placas 9, 8, 7, 6) | Conexión del motor izquierdo al Arduino Nano para poder recibir las ordenes de los movimientos y transmitirlas posteriormente al motor. | | D5, D4, D3, D2 (en algunas placas 5, 4, 3, 2) | Conexión del motor derecho al Arduino Nano para poder rescibir las ordenes de los movimientos y transmitirlas posteriormente al motor. |
Buzzer 5V
| PIN Arduino NANO | ¿Por qué? | | :--- | :--- | | D10 (en algunas placas 10) | Para poder recibir las ordenes del Arduino NANO y ejecutar los pitidos según las pulsaciones de los botones. | | GND | Tierra o masa |
Motores paso a paso 28BY J-48
Es el componente que hace posible el desplazamiento del robot. Se mueven por pequeños pasos para avanzar en un sentido u otro.
Si quieres ampliar información, una entrada de Prometec.net

Imagen de Prometec.net
El conector blanco va colocado a un Driver ULN2003 del que recibirá tanto la alimentación como las órdenes. Una comprobación simple para ver si el funcionamiento es correcto, girar la rueda y ver si se encienden los LEDs de la parte inferior en los Drivers.
Un problema que puede darnos dolores de cabeza es tener un cableado de motores incorrecto. Nos daremos cuenta porque teniendo todo en su sitio y la programación bien, nuestro escornabot invierte algunos movimientos de la botonera. El robot se diseñó y programó para funcionar con los motores conectados de una manera concreta, lo tienes explicado en esta entrada.
Drivers ULN2003
En el conector blanco de la placa pondremos los motores. Cada motor debe ir conectado al driver de su lado o el robot se movera al contrario de las ordenes que le demos.
Encima del conector blanco tenemos cuatro pines o pinchos que son los que conectaremos a los pines D9-D2 de la placa Arduino NANO.
A la izquierda tenemos dos pines o pinchos que son los encargados de recibir la alimentación del portapilas, están marcados con la serigrafía 5-12V y +/-

Recuerda el cuadro de conexiones:
| PIN Arduino NANO | PIN Driver | ¿Por qué? | | :--- | :--- | :--- | | VIN | 5-12V (+) | En esta placa van conectados los motores y necesitaremos conectarlo a este pin para poder coger corriente del Porta Pilas que conectaremos justo encima de los dos cables de corriente de los drivers. | | GND | 5-12V (-) | Tierra o masa | | D9, D8, D7, D6 (en algunas placas 9, 8, 7, 6) | IN1, IN2, IN3, IN4 | Conexión del motor izquierdo al Arduino Nano para poder recibir las ordenes de los movimientos y transmitirlas posteriormente al motor. | | D5, D4, D3, D2 (en algunas placas 5, 4, 3, 2) | IN1, IN2, IN3, IN4 | Conexión del motor derecho al Arduino Nano para poder rescibir las ordenes de los movimientos y transmitirlas posteriormente al motor. |
Protoboard 170 puntos
En esta placa colocaremos el Arduino NANO y nos servirá de enlace con el resto de componentes.
El funcionamiento es simple, sirve para ampliar las conexiones a los pines de la placa Arduino.
Los huecos que queden encima o debajo de cada pin son una extensión del mismo, con una imagen se entiende mejor.
Si quieres ampliar información, una entrada de rinconingenieril.es
Buzzer 5V
Es el altavóz que dota de sonido a Escornabot, cada vez que pulsemos una tecla emitirá un pitido.
Tiene una patilla larga o positivo y una patilla corta o negativo. Si las dos patillas tienen la misma longitud en la parte delantera tienen serigrafiado el valor positivo.

Recuerda el cuadro de conexiones:
| PIN Arduino NANO | Buzzer 5V | ¿Por qué? | | :--- | :--- | :--- | | D10 (en algunas placas 10) | Patilla larga (+) | Para poder recibir las ordenes del Arduino NANO y ejecutar los pitidos según las pulsaciones de los botones. | | GND | Patilla corta (-) | Tierra o masa |
Portapilas 4 unidades AA
El portapilas proporciona la energía para el movimiento del robot.
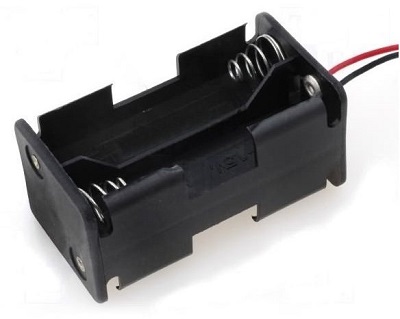
Lleva 4 pilas del tipo AA, hay que fijarse al introducir las pilas para hacerlo en el sentido correcto. Parece algo evidente pero no sería la primera, ni la última vez que una persona las coloca mal y se coge un buen calentón.
Una regla que suelo usar con los peques:
- La parte plana de la pila, va siempre en el lado del muelle
- La parte de la pila que tiene un saliente, en el otro lado.
Recuerda el cuadro de conexiones:
| PIN Arduino NANO | Portapilas | ¿Por qué? | | :--- | :--- | :--- | | VIN | Cable rojo (+) | El portapilas contiene 4 pilas de 1,5 V así que la entrada de corriente será de 6V y este es el único PIN que admite corriente desde 6V a 12V. | | GND | Cable negro (-) | Tierra o masa |
La terminación de los cables se puede crimpar para tener un conector macho en el extremo.
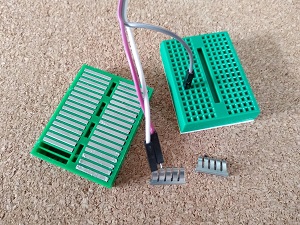
Cables Arduino macho-hembra
Se llaman cables dupont pero me gusta llamarlos cables Arduino porque así cualquier persona lo entiende. Utilizaremos cables macho-hembra, que son los que tienen el pincho en un lado y el hueco en el otro.
Vienen en tiras de 40 y esta es la forma en la que me gusta separarlos:

- Marrón
- Rojo
- Cuatro colores juntos; azul, verde, amarillo y naranja
- Dos colores juntos; violeta y gris
- Blanco
- Negro
- Marrón
- Rojo
- Cuatro colores juntos; azul, verde, amarillo y naranja
- Tres colores juntos; violeta, gris y blanco
- Negro
Con estos cables realizaremos la conexión entre los diferentes componentes, un par de consejos:
- Si ves que el cable no entra en la protoboard, no fuerces. Gira 90 grados antes de volver a intentarlo.
- Cuando el conector se dobla y queda frágil cámbialo por uno nuevo, es un incordio si se parte dentro de la protoboard.
- Si se parte un conector dentro de la protoboard, con unas pinzas de punta fina puedes retirarlo.
Canica 14 mm
Nos indica la parte trasera del robot, hace de rueda loca y aporta estabilidad para los giros.

Si vemos que se sale de la pieza impresa, podemos calentar con mucho cuidado la pieza y moldearla un poco para que la canica quede fija.
Juntas tóricas 63x57x3 mm
Se colocan alrededor de las ruedas a modo de cubiertas como en las ruedas de las bicicletas. Aportan agarre y estabilidad para que los movimientos del robot sean más exactos.
Tornillería y tuercas
Sirven para ensamblar los componentes a las piezas impresas en 3D.
Tornillería
Se utilizan 16 tornillos de métrica 3 y 10mm de lóngitud.
Para componentes como la placa botonera o los drivers ULN2003 utilizo tornillos de 5mm (la mitad de cortos) porque facilitan el montaje

También se pueden utilizar tornillos perforantes, el problema de estos es que si desmontas y montas varias veces el mismo robot, dejan de hacer su función. Son más agresivos a la hora de atornillarse en el plástico, si quedan sueltos utiliza uno de los anteriores.

Tuercas
Se utilizan 2 tuercas de métrica 3 para introducir una en cada rueda y así poderlas fijar a los motores.
