Control de servomotores
Una de las aplicaciones más utilizadas de los sistemas de control por ordenador y en la robótica están asociados con los motores, que permiten accionar o mover otros componentes, como puertas, barreras, válvulas, ruedas, etc. Uno de los tipos que vamos a ver en este capítulo son lo servos, hay de dos tipos:
- El servomotor o servos convencionales que posee la capacidad de posicionar su eje en un ángulo determinado entre 0 y 180 grados en función de una determinada señal.
- Servo de rotación continua Son servos por fuera igual que los anteriores, pero pueden girar 360º y se controlan por tiempo
Por defecto cuando se dice servo, es un servomotor o servo convenciona
Servos de rotación continua

Para controlar un servo de rotación continua, las instrucciones a realizar son :
- Incluyes la librería de servos #include <Servo.h>
- Declaras una variable servo Servo myservo; //puedes poner el nombre que quieras p.e. miservo
- En setup() tienes que decir a qué pin está conectado myservo.attach(9); //por ejemplo pin 9
- Y en loop()
- myservo.write(90); //significa servo parado
- myservo.write(180); //significa servo funcionando al 100% en el sentido de las agujas del reloj
- myservo.write(0); //significa servo funcionando al 100% en el sentido contrario de las agujas del reloj
Mira el vídeo, esta realizado con otra shield ECHIDNA y con bloques (curso Echidna https://libros.catedu.es/books/arduino-con-echidna-y-mblock-scratch ) fíjate como:
- Los extremos 0º y 180º es a máxima velocidad, pero un sentido u otro.
- 90º es parado.
- Un valor intermedio es menos velocidad (se ve el ejemplo 80º y 100º) -
- Si tiene deriva, (cosa frecuente) tienen un potenciómetro para ajustar.
Si quieres saber más sobre servomotores te recomendamos estas paginas del Zaragozano Luis LLamas: Servomotores convencionales y Servomotores de rotación continua
Servomotores o servos convencionales

Los servos son un tipo especial de motor en el que se añade una circuito lógico electrónico que permite un control mucho más preciso que a un motor normal de corriente continua. Esto les permite posicionar el eje en un ángulo determinado.
El hardware interno se compone de un potenciómetro y un circuito integrado que controlan en todo momento los grados que gira el motor. De este modo, en nuestro caso, desde Arduino, usando las salidas digitales PWM podremos controlar fácilmente un servo. Lo ideal es conectarlo a 6V pero trabajan bien en los 5V del Arduino.
Hay muchos modelos, en robótica educativa cuestan entre 1-5€, el más común es el SG90, muy barato, pero tiene muy poca fuerza, el MG90S tiene algo más, si queremos algo más, ya tiene que ser el MG996R pero ya este modelo NO se puede conectar directamente al Arduino, el pico de energía que necesita, provoca el reinicio de la placa. Incluso varios pequeños SG90.
Las instrucciones son las mismas que los servos de rotación continua, pero los valores que se proporcionan son los grados que se desean.
- Incluyes la librería de servos #include <Servo.h>
- Declaras una variable servo Servo myservo; //puedes poner el nombre que quieras p.e. miservo
- En setup() tienes que decir a qué pin está conectado myservo.attach(9); //por ejemplo pin 9
- Y en loop()
- myservo.write(90); //Posición 90º (posición por defecto)
- myservo.write(180); //Posición 180º
- myservo.write(0); // Posición 0º
La instrucción myservo.write(angulo) envía por el pin digital declarado en myservo.attach() pulsos cuadrados de 50Hz y de anchura el estado alto proporcional al ángulo que se desea.
- Un pulso de 0.5-1ms es 0º
- Un pulso de 1.5 ms es 90º
- Un pulso de 2-2.5ms es 180º
Si quieres saber más, te recomendamos https://www.luisllamas.es/controlar-un-servo-con-arduino/
Montaje 25: Testea tu servo (servomotor)
En el siguiente programa de testeo (fuente: forum arduino) vamos a probar el servo.
- Conecta el servo al pin 7
- Utiliza el puerto serie para teclear el ángulo que quieras con el teclado de tu ordenador.
- No queremos que entiendas todo el código, pues el puerto serie lee es caracteres ASCII y tiene que convertir el carácter a ángulos.
- Si tecleas un valor más grande de 500 se le indica al servo no el ángulo que se tiene que mover, sino cuanto tiempo en ms se tiene que mover.
Montaje 25: Conexión sin Edubásica
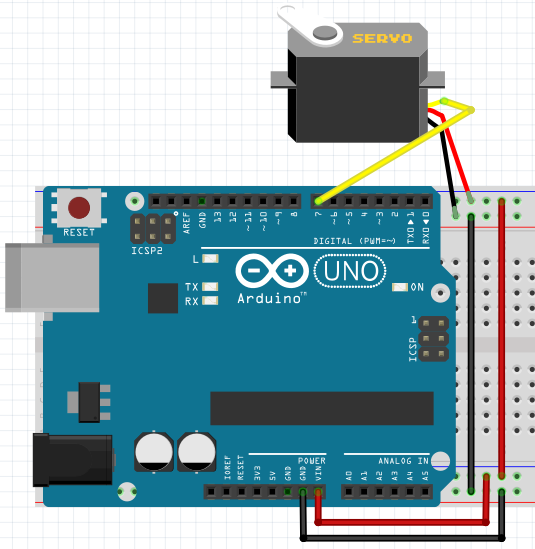
La conexión se realiza mediante 3 cables: 2 de alimentación (+5V/GND) y un tercero, conectado por ejemplo el 7 , donde indicaremos los grados que queremos que gire a través de un programa en Arduino.
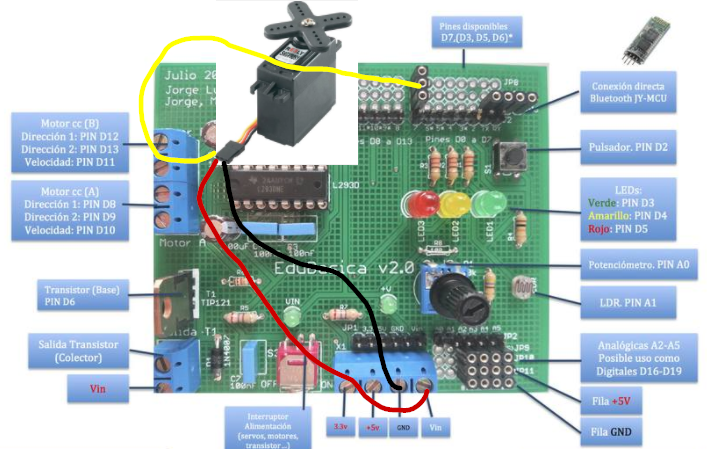
Montaje 25: Conexión con Edubásica
En Edubásica tenemos una forma muy sencilla de conectar un servo a la tarjeta. Lo puedes hacer mediante las clavijas identificadas con JP3. De arriba abajo las conexiones son:
- Señal (pin7)
- +Vin
- GND
Recuerda que siempre puedes utilizar los pines analógicos como E/S digitales, del pin 14 al 19.
Por ejemplo, puedes conectar el servo al pin analógico 5, pero declarado como digital en el 19.
Montaje 25: video
Por ejemplo en este Servo HD-1440A con el anterior programa se ve que es un servo barato:
- No puede hacer ángulos de +180º luego es un servo convencional
- No puede hacer ángulos de menos de 10º no llega a parar, o sea tiene deriva.
Si eliges uno un poco más caro como el MG90S no tiene estos problemas en los extremos. Ver
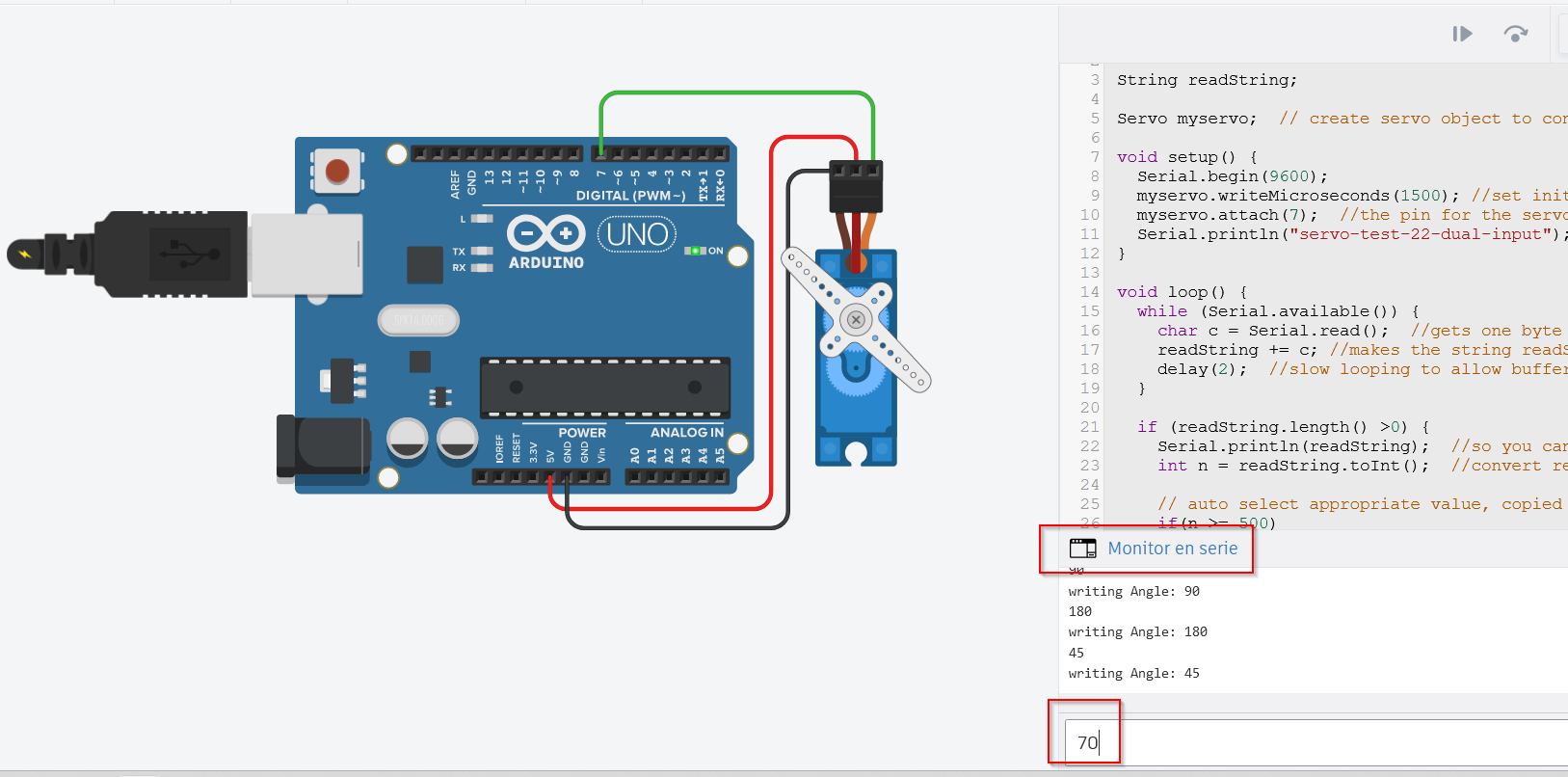
Montaje 25: simulación
Aquí lo tienes simulado en Tinkercad https://www.tinkercad.com/things/4FQNFOdoS8Z-25testeatuservo
Pincha en simulación y luego código, y encontrarás el cuadro monitor serie donde puedes teclear el ángulo que quieras. Observa al servo cuando pulses Intro
Montaje 25: Programa
https://create.arduino.cc/editor/javierquintana/1d59ad76-dc4a-4b6d-8238-66ae593ce728/preview
Montaje 2 controlando el servo
Arduino incluye una librería con funciones para mover de una manera sencilla un servo, lo primero es introducir un include con la librería al principio, luego creamos el objeto (que será el nombre que usaremos en todo el programa para cada servo que queramos controlar) .
Por último, asociamos el servo al pin al que lo hemos conectado (7).
Una vez declarado, para usarlo, dentro de loop simplemente usamos la función servo.write(posicion)
Moverá el servo los grados que le indiquemos mediante la variable entera: posicion.
A continuación verás un sencillo ejemplo , dejamos un pequeño delay , para permitir que el servo alcance la posición antes de darle la siguiente orden:
#include
Servo myservo; // crea un objeto tipo servo para controlar el servo
int pos ; // variable para almacenar la posición del servo
void setup(){
myservo.attach(7); // En EduBasica el servo se conecta al pin 7
}
void loop()
{
pos=90;
myservo.write(pos);
delay(1000);
pos=180;
myservo.write(pos);
delay(1000);
pos=45;
myservo.write(pos);
delay(1000);
}Montaje 3 servo paso a paso
En este caso queremos que practiques la función for
#include
Servo myservo; // crea un objeto tipo servo para controlar el servo
int pos ; // variable para almacenar la posición del servo
void setup(){
myservo.attach(7); // En EduBasica el servo se conecta al pin 7
}
void loop()
{
for (pos=10; posMontaje 4 servo y potenciómetro
Actividad
Podemos probar una aplicación muy importante que está basada en mover el servo según una determinada entrada analógica. Este nos puede ser muy útil si queremos controlar servos por medio de joysticks por ejemplo o cualquier dispositivo que cuente con potenciómetros para realizar un movimiento.
Este está obtenido desde los ejemplos que vienen incluido en la IDE de de Arduino (Knob) que encontrarás en: Archivo->Ejemplos->Servo, sólo hemos cambiado esta línea: myservo.attach(7);
Lo que hace este programa es variar la posición del servo enfunción de la posición del potenciómetro que leemos de manera analógica.
Sólo nos queda mapear la lectura para que se mueva de 0 a 180º.
/*
Controlling a servo position using a potentiometer (variable resistor)
by Michal Rinott
modified on 8 Nov 2013
by Scott Fitzgerald
http://www.arduino.cc/en/Tutorial/Knob
*/
#include
Servo myservo; // create servo object to control a servo
int potpin = 0; // analog pin used to connect the potentiometer
int val; // variable to read the value from the analog pin
void setup() {
myservo.attach(7); // attaches the servo on pin 9 (bueno ahora 7) to the servo object
}
void loop() {
val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)
val = map(val, 0, 1023, 0, 180); // scale it to use it with the servo (value between 0 and 180)
myservo.write(val); // sets the servo position according to the scaled value
delay(15); // waits for the servo to get there
}