5.2 Motores DC

Arduino (UNO) no proporciona corriente suficiente para hacer funcionar, en condiciones "dignas", un motor de corriente continua de los que solemos usar en el aula-taller de Tecnologías (motor DC). Conviene alimentar Arduino con una fuente externa (7 -12 V) para poder proporcionar intensidad necesaria para el par motor requerido en los proyectos. Para más información de cómo hacerlo se recomienda consultar el apartado (Alimentación eléctrica de Arduino). Existen "shields" o tarjetas que se encajan sobre Arduino y le añaden funciones específicas como mover motores DC.
Alimentación
Como vimos en la sección de Alimentación eléctrica de Arduino no es recomendable alimentar Arduino, cuando se trabaja con elementos de "alto" consumo como pueden ser los motores DC, con el cable USB. Tenemos la posibilidad de proporcionar más (mili)amperios a través de la conexión jack de Arduino. En el pin Vin tendremos una salida del voltaje que apliquemos por el jack que servirá para alimentar a los motores a través del integrado mediante el pin 8 (VC ó Vcc2). Para ver los márgenes de voltaje de trabajo del CI consultar la hoja de datos del fabricante.
Si el motor es pequeño y trabaja sin carga, sí que se puede.
Recomendamos las siguientes páginas de Luis Llamas:
Para obtener más información sobre estas placas se puede consultar la web oficial de Arduino: http://www.arduino.cc/en/Main/ArduinoMotorShieldR3
Además de utilizar una shield específica de motores DC, tenemos otras posibilidades para ponerlo en marcha:
Montaje con transistor
El transistor es un componente analógico con infinidad de aplicaciones. Como se observa en la imagen, es un dispositivo con tres pines llamados emisor (E), colector (C) y base (B). El funcionamiento a groso modo es sencillo: Si suministramos "cierta" cantidad de corriente al terminal llamado base, entre los terminales emisor y colector circulará una corriente proporcional a la que entra por la base. Puede ser unas 100 veces mayor (este valor dependerá del transistor y se llama ganancia), por lo tanto, lo que tenemos es un amplificador de corriente, o sea, que con una intensidad pequeña podemos obtener una más grande entre los terminales emisor y colector. Si a estos dos terminales conectamos un motor DC conseguiremos hacerlo girar con garantías. Cuando no hay corriente en la base (o es muy pequeña) el colector y emisor están desconectados y no circulará corriente entre ellos.
En el tema de Electrónica Analógica - Transistores de este curso se puede encontrar más información sobre este componente electrónico.
Descripción y esquemas
CON EDUBÁSICA
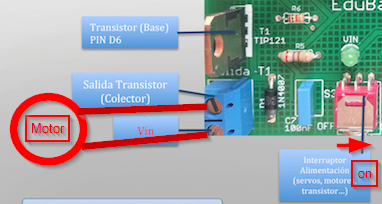
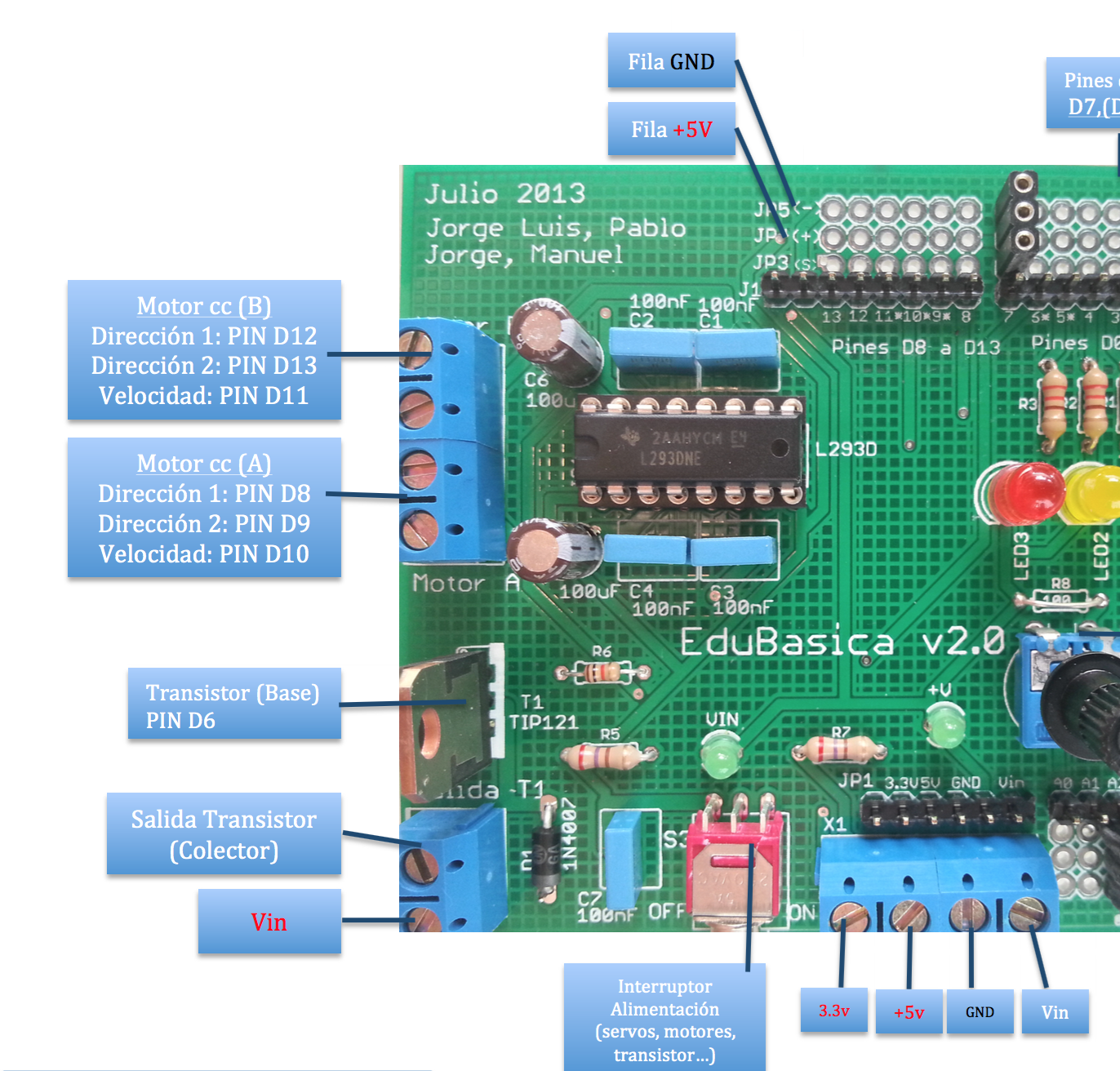
La shield de Edubásica ya tiene incorporado el transistor y los diodos de protección para funcionar el motor, para ello tenemos que hacer:
- Poner el interruptor en ON
- Conectar el motor en la salida del transistor y Vin
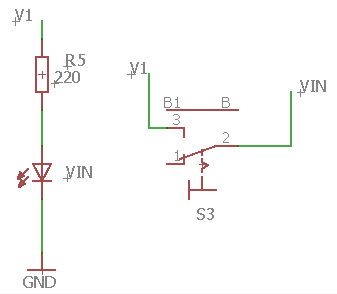
- Utilizar D6 como pin de control del motor
SIN EDUBASICA
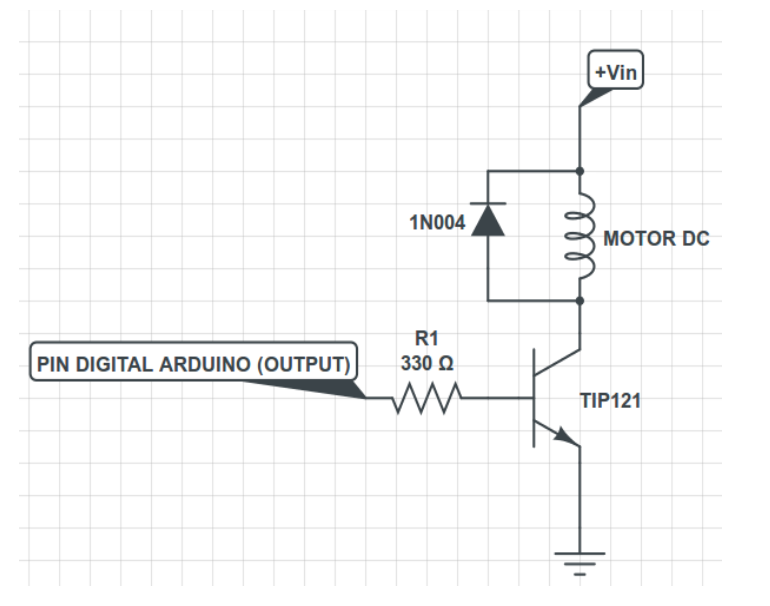
Desde Arduino (salida digital) actuamos sobre la base si enviamos un HIGH al pin digital donde la conectemos (pin 6 en el esquema). El transistor tiene que tener suficiente ganancia. Se conecta un diodo de protección en antiparalelo (1N004). Cuando el motor se para las bobinas se desmagnetizan y se descargan de energía eléctrica. El diodo proporciona un camino para su descarga (la energía se disipa en forma de calor en el diodo) y así se evita que sufra el transistor.
Otra posibilidad que protege el transistor es, en vez de conectar directamente el motor al colector del transistor, ubicar un relé en esa posición y accionar el motor con alimentación independiente con la conmutación del relé. Este ejercicio se propone en la sección de actividades.
Ejemplo de montaje con TIP121 (NPN, par Darlington *):
- Datasheet: https://www.fairchildsemi.com/datasheets/TI/TIP120.pdf
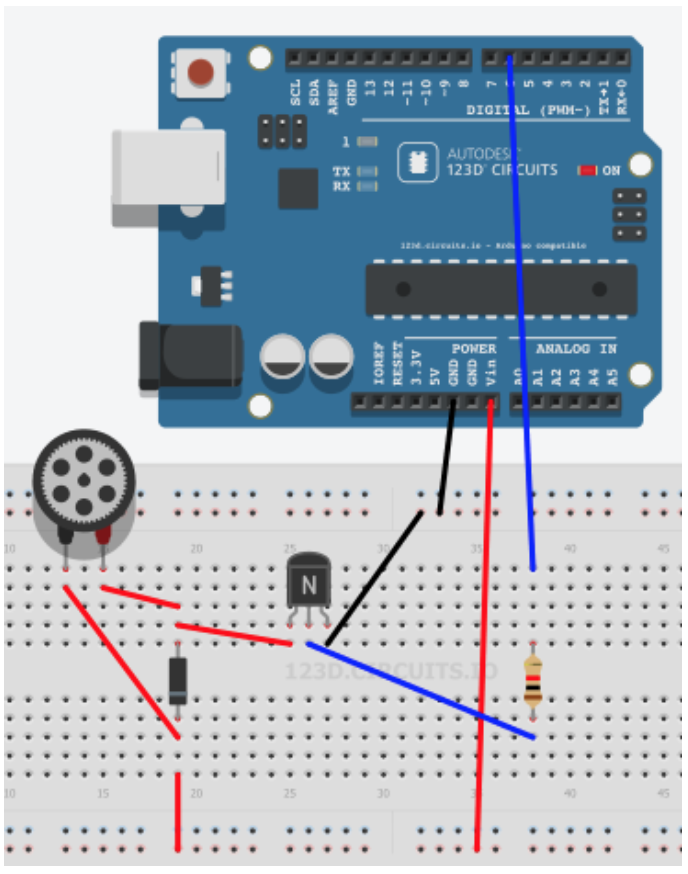
Montaje 5 Motor con transistor
Monta el motor con el Arduino utilizando Edubásica o utilizando un transistor tal y como se ha explicado en las páginas anteriores. NO CONECTES UN MOTOR DIRÉCTAMENTE A LOS PINES DEL ARDUINO puedes dañarlo.
Este es el programa que te proponemos:
// Activa y desactiva un
// motorDC conectado al pin6
// durante 2 segundos
#define motorDC 6
void setup() {
pinMode(motorDC, OUTPUT);
}
void loop() {
digitalWrite(motorDC, HIGH);
delay(2000);
digitalWrite(motorDC, LOW);
delay(2000);
}¿Te atreves?
Diseñar un montaje que active el motor DC mediante un relé conectado al colector del transistor.
Montaje con Circuito L293
El circuito integrado L293 permite controlar motoresDC de pequeña potencia, pero en general bobinas, o sea cualquier elemento que precise pico de potencia, como los relés, etc.. Para utilizarlo hay que hacer un montaje externo a Arduino, en una placa de pruebas, y alimentar a los motores a través de este circuito integrado.
El CI L293 tiene las siguientes características:
- Se pueden controlar hasta 2 motores.
- Proporciona 1A a los motores (en total) y permite cambiar el sentido de giro.
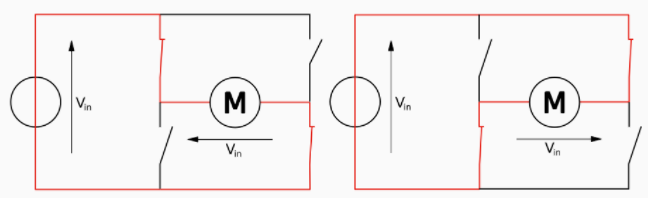
- Utiliza un puente en H que funciona según se observa en las figuras (internamente utiliza transistores para conmutar*) :
![]()
Modos de operación para invertir el sentido de giro:
"H bridge operating" by Cyril BUTTAY - own work, made using inkscape. Licensed under CC BY-SA 3.0 via Wikimedia Commons.
{kind=link}
*Datasheet: http://www.me.umn.edu/courses/me2011/arduino/technotes/dcmotors/L293/l293.pdf
Con Edubásica
Edubásica es una tarjeta diseñada para facilitar la tarea en el aula. Elimina gran parte de cableado y conexiones en la placa de pruebas lo que evita muchos errores en las prácticas.
En esta placa disponemos de las dos opciones vistas anteriormente. Edubásica lleva montados, entre otros componentes, un circuito integrado L293 y un transistor. Por lo tanto podemos activar motores usando ambas opciones, aunque lo recomendable es utilizar el L293 que permite el cambio de sentido de giro y regular la velocidad actuando con una señal PWM sobre los dos pines de habilitación (dependiendo de la hoja de datos viene como ENABLE o CHIP INHIBIT) del circuito L293. Los pines de Arduino que pueden regular la velocidad por PWM correspondientes a esas patillas de habilitación serán: D10 para el motor A y D11 para el motor B.
Para hacer funcionar dos motores DC con Edubásica sólo tenemos que conectar en las clemas indicadas (serigrafiados en la placa como Motor A y Motor B) los dos cables de cada motor. Según se observa en la imagen, tenemos 4 conexiones para los dos motores. Desde Arduino y con la tabla de verdad del CI L293 indicada en la sección anterior, podemos regular el sentido de giro y velocidad de cada motor.
Edubásica lleva un interruptor que permite tomar el voltaje de la salida Vin de Arduino (alimentación externa), necesaria para dar la corriente suficiente para accionar los motores. Cuando el piloto Vin está encendido significa que la alimentación de Edubásica viene de Vin de Arduino, o bien, directamente desde una fuente externa conectada a la clema Vin de Edubásica de la regleta de alimentación (en la imagen la regleta de la parte inferior).
Es muy fácil, podemos conectar hasta dos motores en los pines dispuestos para ello, y utilizaremos:
- Para el motor A el control de velocidad por el pin 10 y las direcciones por 8 y 9
- Para el motor B el control de velocidad por el pin 11 y las direcciones por 12 y 13.
- Interruptor en ON
Conectando los dos terminales del motor a la clema del transistor de Edubásica, también podríamos hacerlo funcionar enviando un nivel HIGH al pin digital 6 de Arduino. Este pin (D6) está conectado directamente a la base del transistor de Edubásica. La desventaja respecto al CI L293 es que, en este caso, no podríamos cambiar el sentido de giro.
Sin Edubásica
Vamos a ver de qué manera se pueden activar los motores DC para hacer una secuencia sencilla de giro. Primero de todo vamos a ver cómo se conecta todo.
Las conexiones del circuito integrado según podemos ver en la hoja de datos del fabricante son las siguientes:
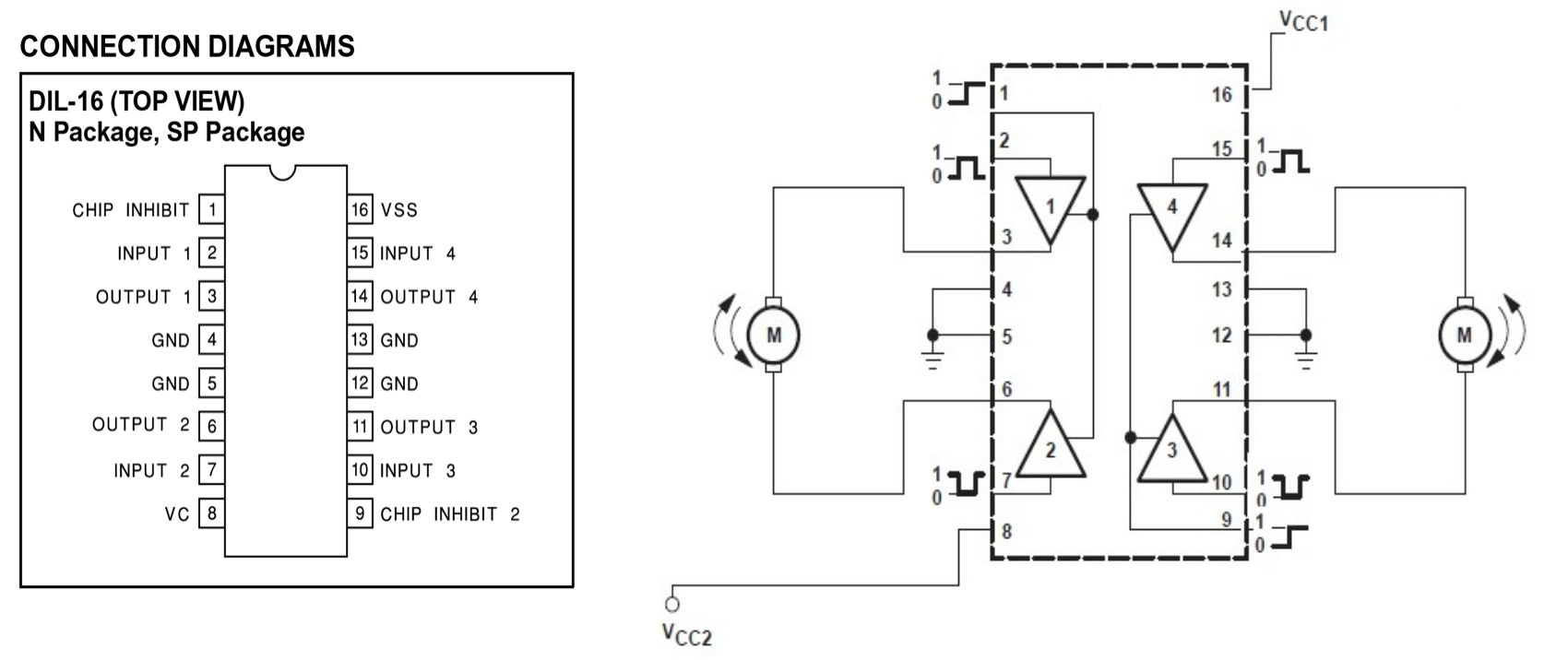
Vcc2(VC), pin 8 del L293: El voltaje que se introduzca aquí alimentará a los motores (Vin de Arduino).
Vcc1(VSS), pin 18 del L293: El voltaje que se introduzca aquí alimentará al propio circuito integrado (+5V de Arduino).
Las conexiones del circuito con Arduino las podemos ver en el siguiente esquema:
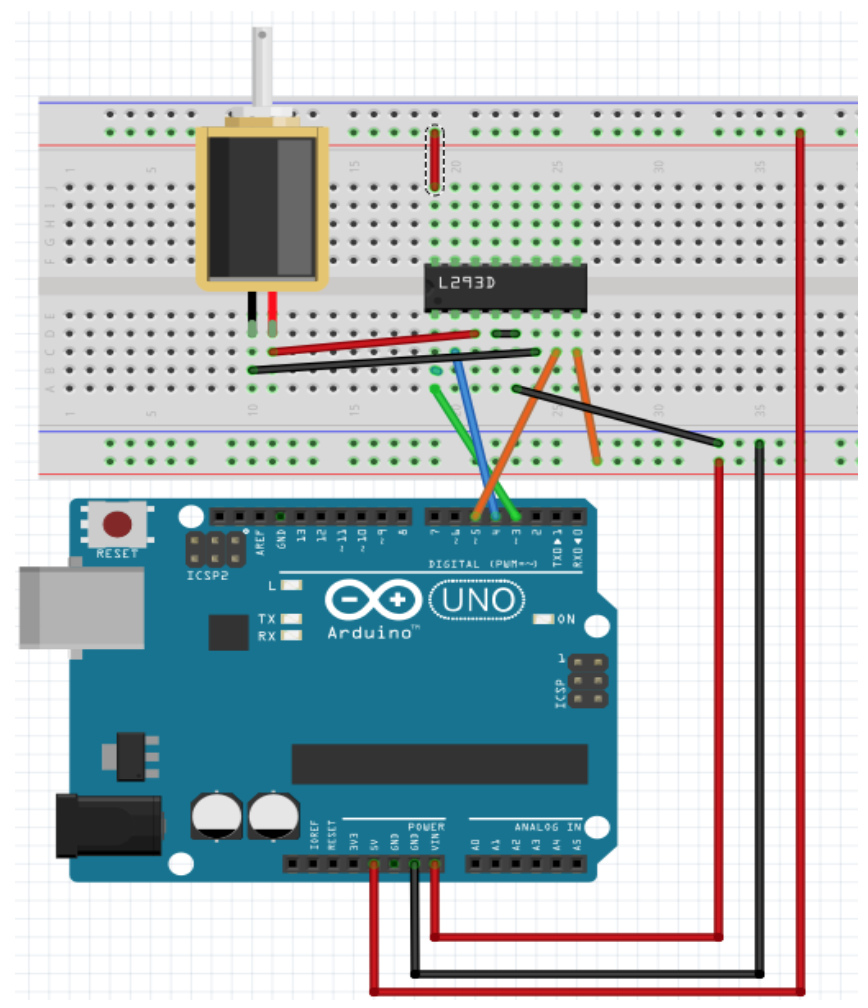
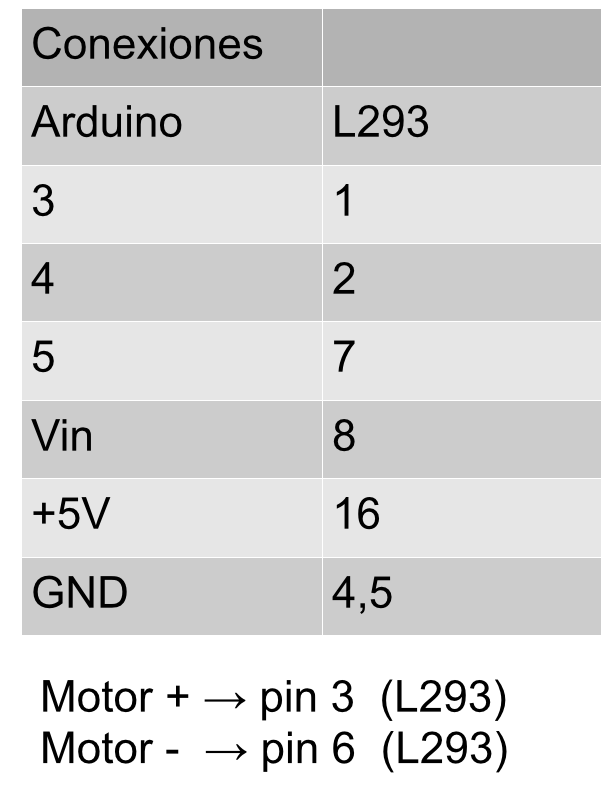
Vamos a detallar la correspondencia entre pines de Arduino y del circuito L293
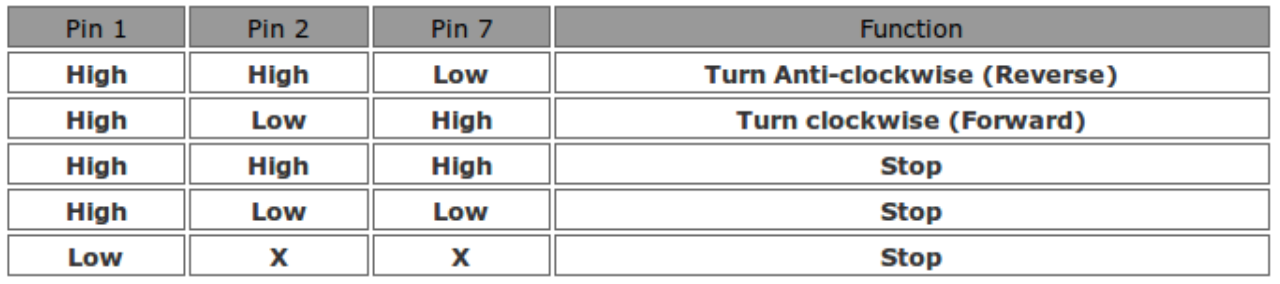
Para saber la orientación del sentido de giro disponemos de la siguiente tabla de verdad:
Vamos a darle un poco de emoción

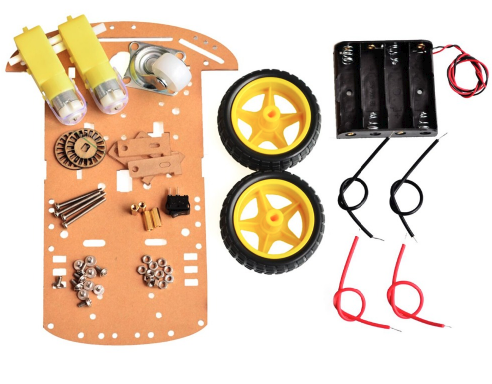
Chasis coche Con Edubásica
Puedes ver en esta página de Luis Llamas cómo hacer un coche teledirigido puede salir por menos de 20€, nosotros como ya tenemos el L298N integrado en Edubasica, sólo hemos comprado el chasis por 7€ y no vamos a poner sensor ultrasonidos y sensor de línea:
Si quieres hacerlo todo terreno Luis Llamas te explica cómo hacerlo con cadenas.
Conexiones
Las conexiones son muy sencillas:
- Pines motor A al conector pines motor A de Edubásica
- Pines motor B al conector pines motor B de Edubásica
- Cables de las pilas a Vin y GND
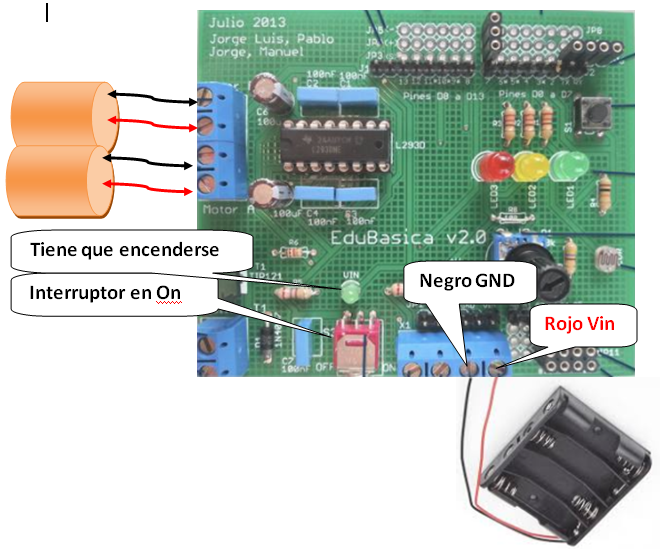
NOTA: Si funciona pero con las oŕdenes cambiadas (es decir que queremos que gire a la izquierda y va hacia delante, queremos que vaya hacia delante y gira a la izquierda...) es debido a que tenemos los cables rojo y negro de un motor intercambiados.
Ordenes
Estos son los pines que hay que activar:
|Orden|MotorA|MotorB| |--|--|--| |Velocidad|10|11| |Dirección 1|8|12| |Dirección 2|9|13|
La tabla de verdad es muy fácil:
MOTOR A
|Pin 10|Pin 8|Pin 9|MotorA| |--|--|--|--| |HIGH|HIGH|LOW|giro| |HIGH|LOW|HIGH|giro contrario| |LOW|X|X|STOP|
MOTOR B
|Pin 11|Pin 12|Pin 13|MotorB| |--|--|--|--| |HIGH|HIGH|LOW|giro| |HIGH|LOW|HIGH|giro contrario| |LOW|X|X|STOP|
AUN TE QUEDA UNA CONEXIÓN
Recuerda que en el transistor aún puedes poner otro motor. Respecto a terminales digitales, te quedan pines para poner servos, sensor de ultrasonidos, sensor de líneas...
... en fin que las posibilidades son muchas