EN VIVO conexión 2.4 o cable
Tenemos dos opciones de comunicarnos con mBot, inalámbrica 2.4G o con cable, aconsejamos la primera:
Conexión inalámbrica 2.4G
La conexión inalámbrica se realiza a través de la mochila 2.4G. Insertamos el pincho USB de la mochila (no necesita ningún driver, el ordenador lo interpreta como un ratón inalámbrico).

Pincho USB 2.4G fuente Makeblock.es
Cada pincho va asociado a un robot (o mejor dicho: Laa placala y el pincho de la mochila 2.4G están emparejados, si el led de la mochila parpadea es que ha perdido conexión).conexión, podemos emparejarlo haciendo una pulsación larga en el botón que hay en la mochila 2.4G.

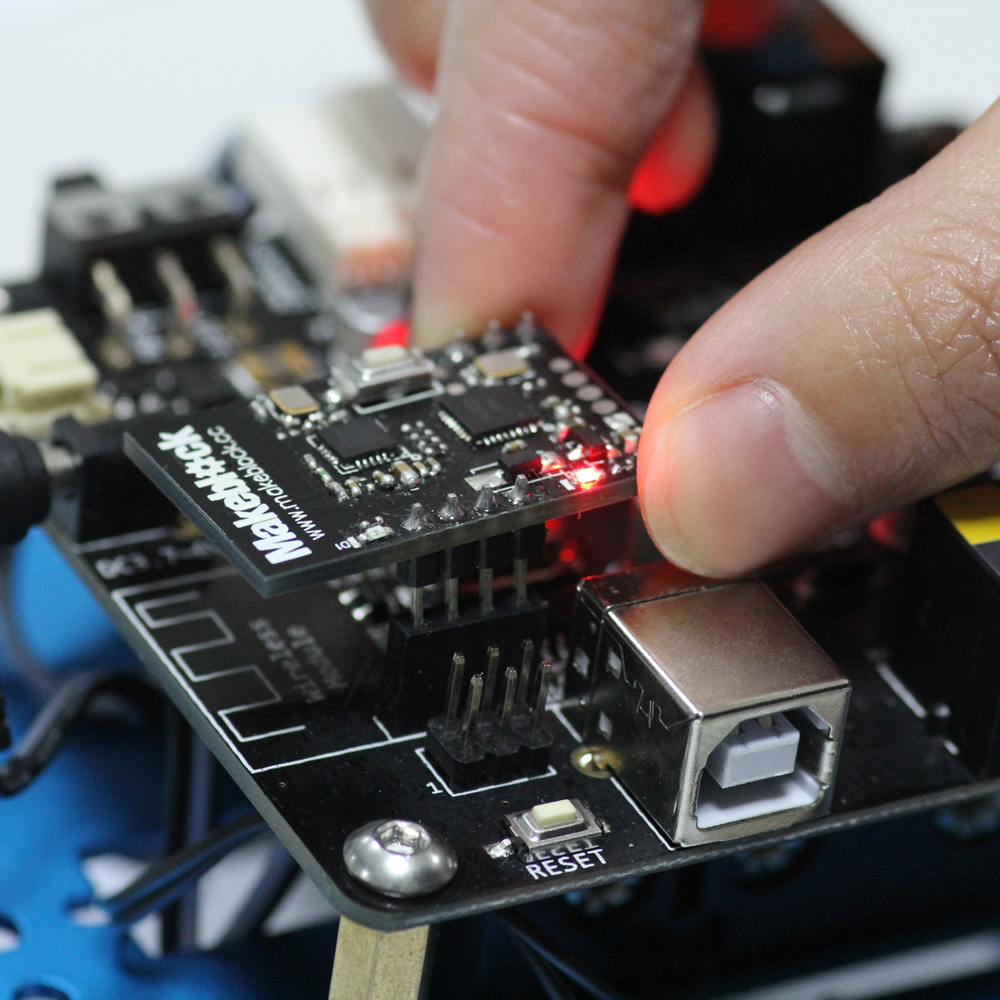

FuenteMochila de2.4G lasfuente imágenes: http://makeblock.es/es
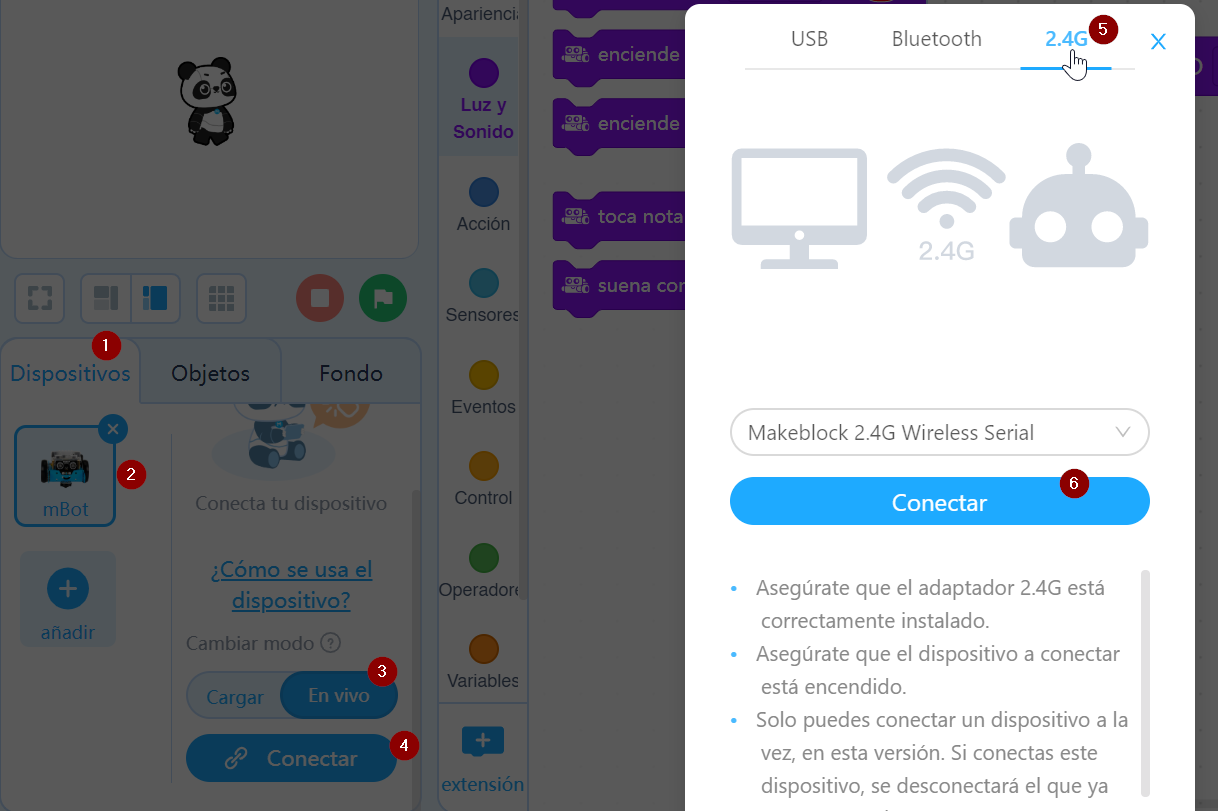
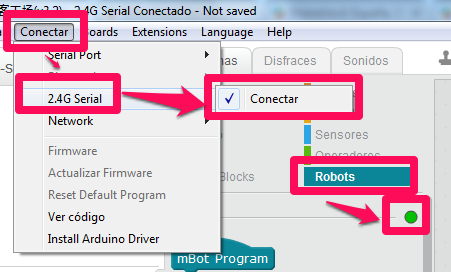
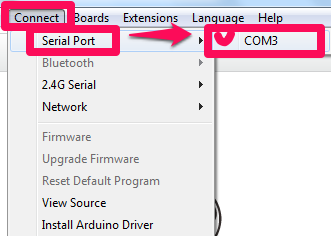
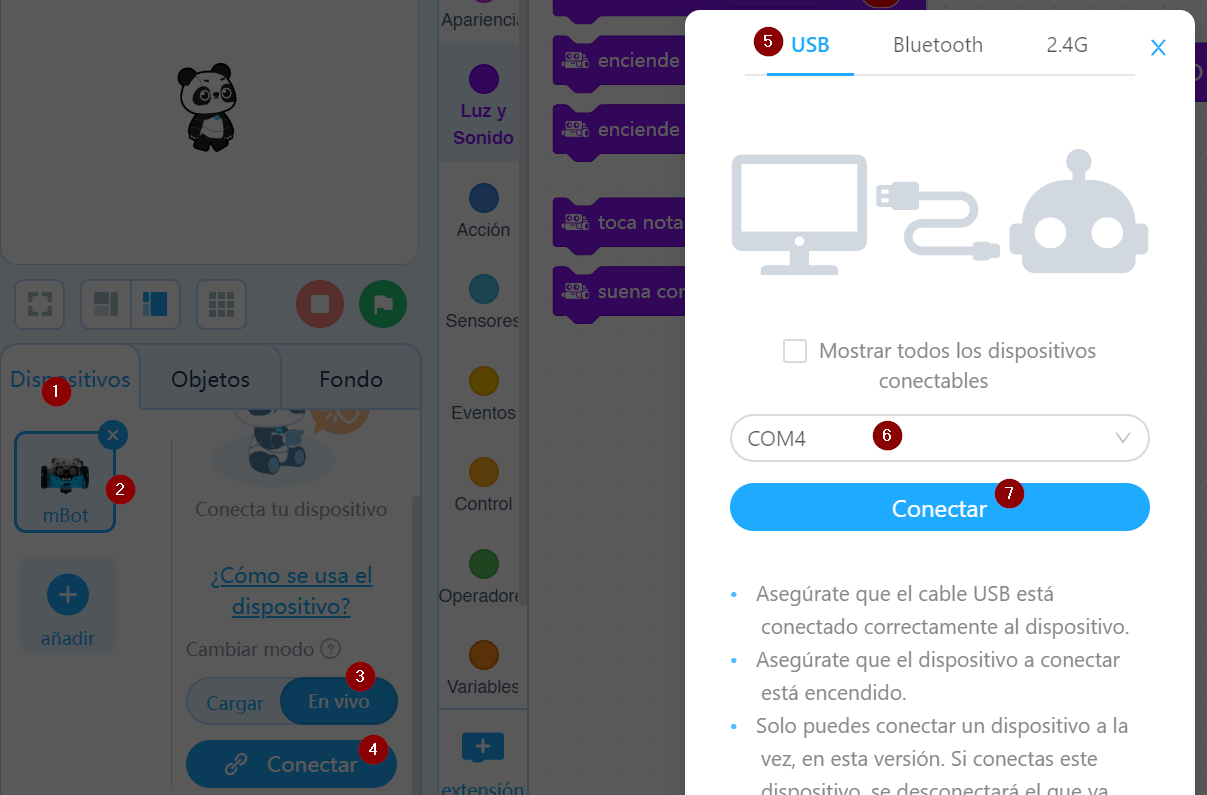
y conectamos el robot con el programa en Conectar- 2.4G Serial- Conectar
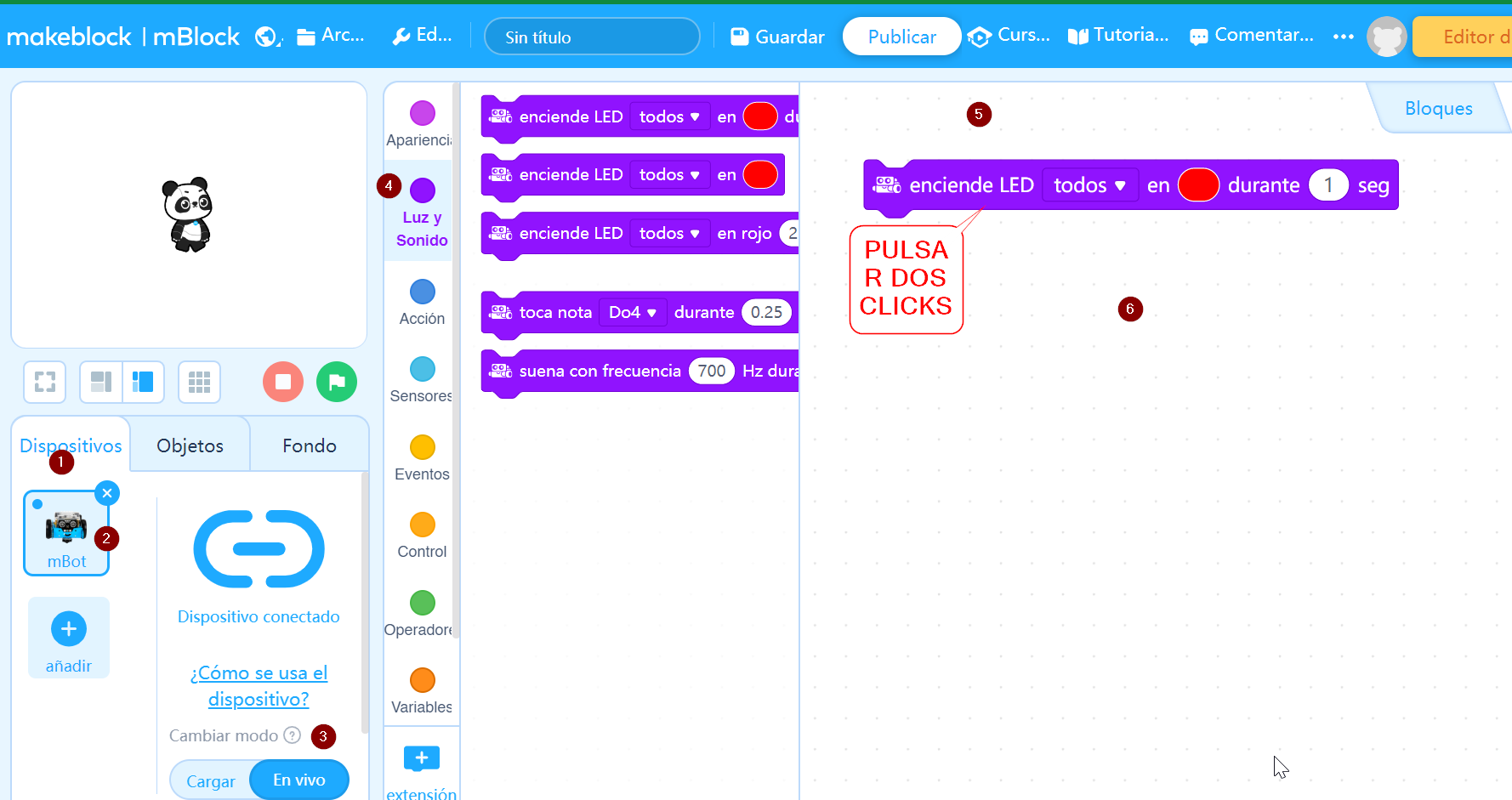
Si HAsale REALIZADOque CORRECTAMENTE,esta conectado 2.4G ya podemos trabajar SOLO EN ELVIVO
Podemos INSTRUCCIONESprobarlo "Robots"haciendo CAMBIAdos ELclicks PILOTO DE ROJO A VERDE es el mejor marcador para comprobar quea la conexióninstrucción estáde correcta:encender led rojo durante un segundo
Conexión por cable
Existe la posibilidad de conexión por cable, útil por ejemplo si se ha perdido el pincho, seguir programando hasta la espera de la compra de otro, o por ejemplo si se agotan las pilas, por cable el robot puede seguir funcionando. Evidentemente con la pérdida de libertad de movilidad.
También la conexión por cable es necesaria si queremos que el robot funcione independiente del ordenador (ver Módulo 3)
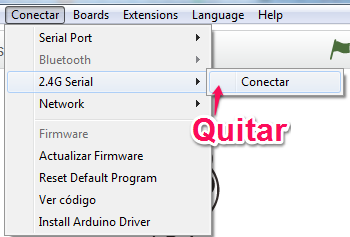
No hay que olvidar que si optamos por la conexión Serial por el puerto USB, TENEMOS QUE DESCONECTAR LA OTRA CONEXIÓN INALÁMBRICA:
En este modo, también tiene que estar el piloto verde de las instrucciones Robots
Un vídeo resumen de todo: