SmartCamera - sigue líneas
mBot ya tiene un sigue-lineas https://libros.catedu.es/books/robotica-educativa-con-mbot/page/siguelineas pero no trabaja la inteligencia artificial. Es un sensor que nos detecta el brillo del suelo y sobre esa respuesta programamos la potencia de los motores para que sigan la línea.
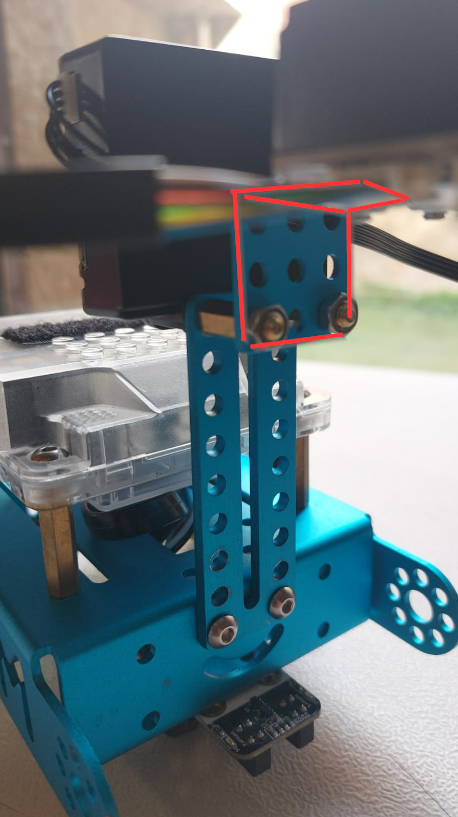
Pero en este caso será la cámara la que detectará la línea y tomará la decisión de qué rumbo tomar, para ello montaremos la cámara con una visión horizontal utilizando la pieza de ángulo recto:
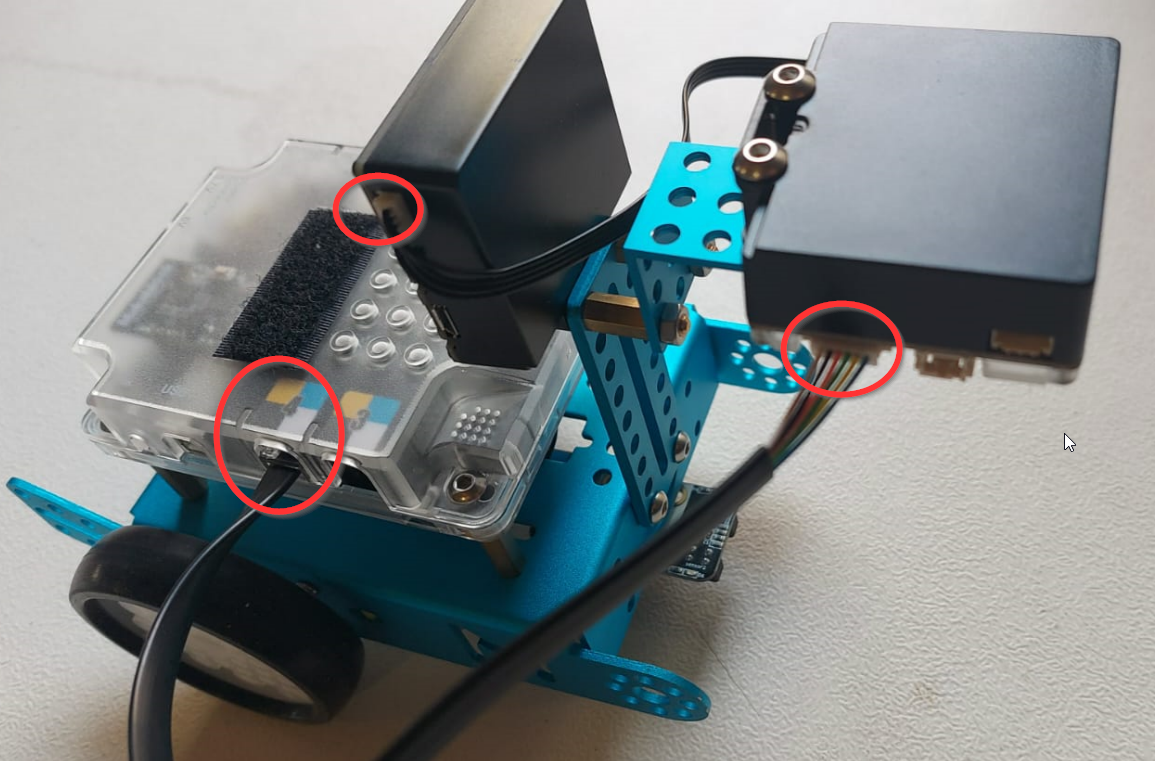
Y conectaremos la batería con la SmartCam y el puerto I2C con el Puerto 4 por ejemplo.
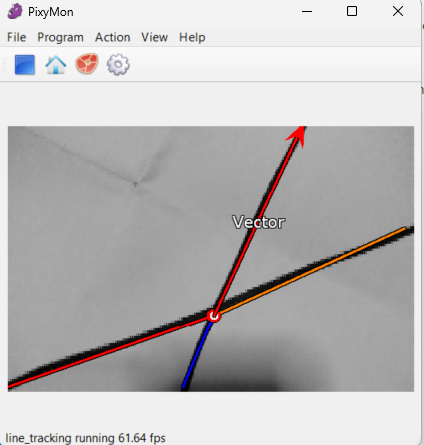
En este modo, la SmartCam reconoce las líneas que ve, y con el programa Piximon las marca con diferentes colores y decide de forma óptima el camino a seguir. El color rojo marca la decisión
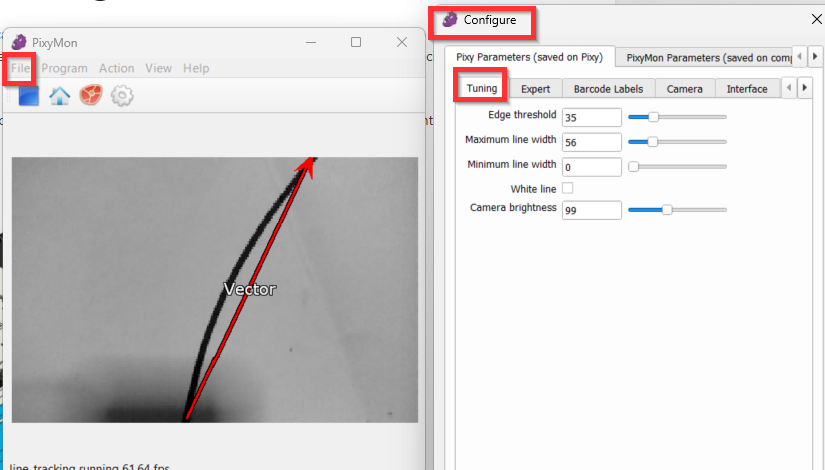
Si el fondo,, contraste o grosor de las líneas no es el adecuado, con el programa PixiMon podemos cambiar la configuración para que lo detecte correctamente:
Si cargamos el programa siguiente https://planet.mblock.cc/project/3715899

El resultado es :
Explicado paso a paso
La decisión en una intersección con programación
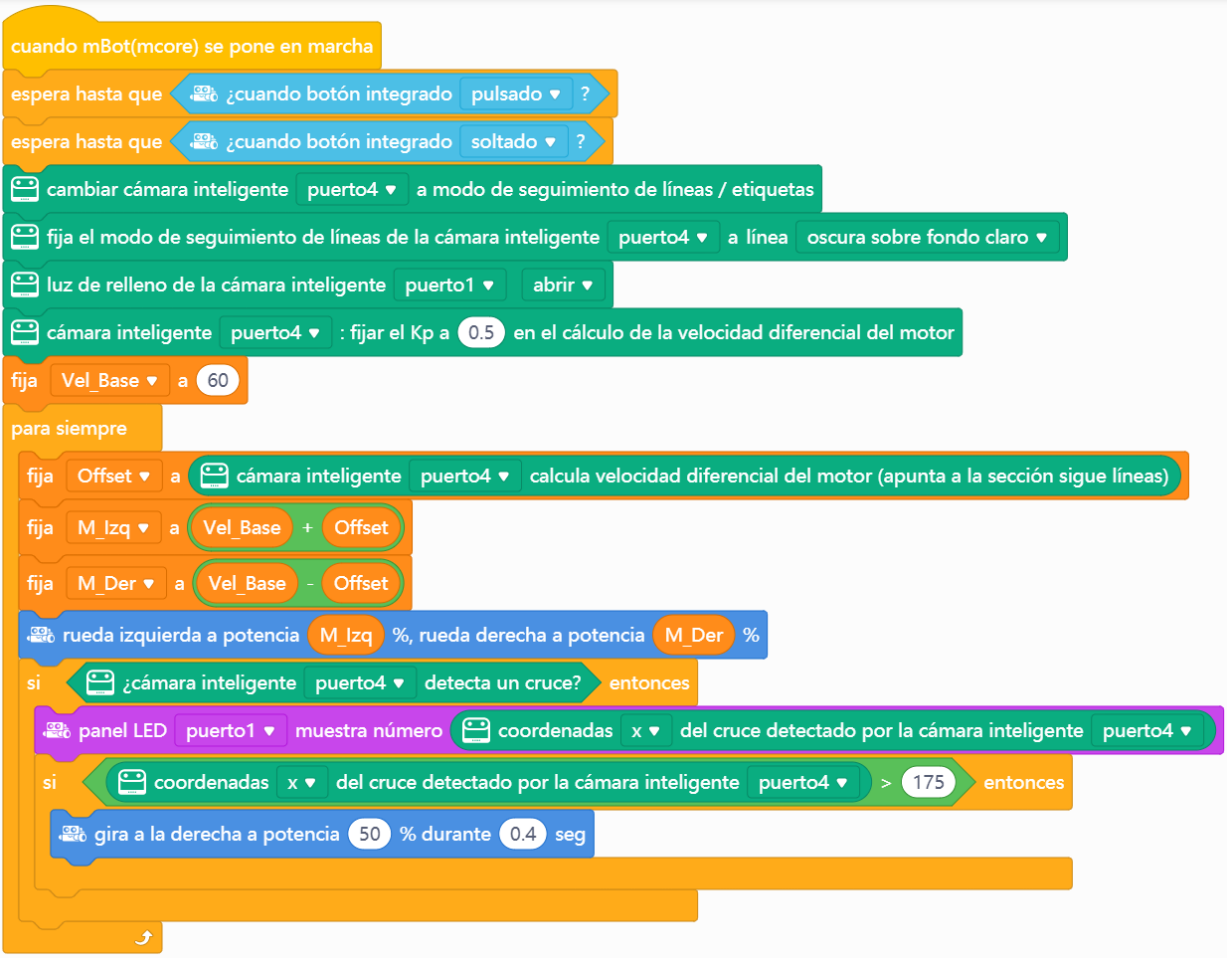
Si queremos que no decida automáticamente, sino que por ejemplo el ángulo del cruce es menor de 45 que gire a la derecha, el código sería
https://planet.mblock.cc/project/3716895

También podriamos hacer la decisión en función si el cruce está más a la derecha o más a la izquierda, recuerda que las coordenadas x van desde el extremo izquierdo 0 al extremo derecho 320. Una opción sería :
Extraído del Tutorial Smart Camera de Makeblock”, creada por Susana Oubiña Falcón,
Licencia CC-BY-NC https://juegosrobotica.es/smart-camera-makeblock/
La decisión de una intersección por código de barras
El modo sigue-lineas es también modo de etiquetas :

Esto nos permite que podemos utilizar las etiquetas para las decisiones de las intersecciones

Extraído del Tutorial Smart Camera de Makeblock”, creada por Susana Oubiña Falcón,
Licencia CC-BY-NC https://juegosrobotica.es/smart-camera-makeblock/