Actuadores
Un actuador es el nombre genérico que empleamos para cualquier dispositivo capaz de realizar acciones en el mundo físico y que podremos controlar desde un autómata o procesador como Arduino. En particular, usamos el nombre actuador para los dispositivos que son capaces de generar movimiento.
Luis LLamas CC-BY-NC-SA
Motores

Conexiones
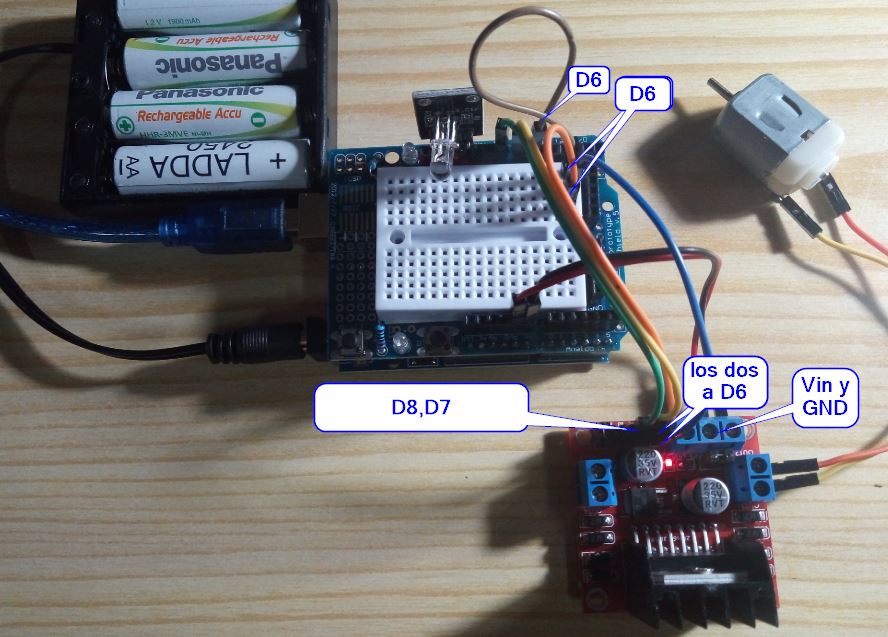
Si quieres usar un motor, no se puede conectar directamente al Arduino, necesita el LM298N y las pilas.
CC-BY-NC Luis Llamas
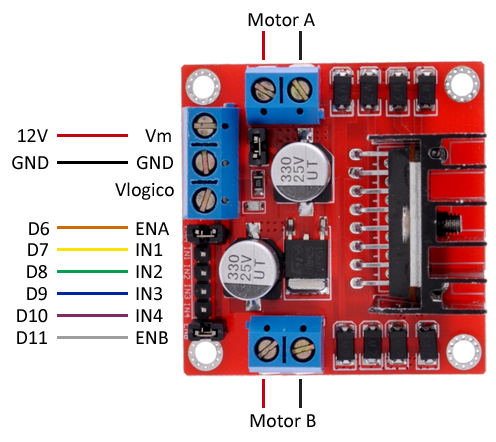
Aunque se puede usar dos motores, nosotros sólo vamos a usar el Motor A, D6, D7 y D8 con estas conexiones:
- Motor A al motor
- Vm al Vin del ARDUINO
- GND al GND del ARDUINO
- ENA al D6 OJO SON DOS PINES quitaremos el jumper y conectaremos los dos al D6 para ello usaremos la Protoboard
- IN1 al D7
- IN2 al D8
También usaremos el LedRGB con las mismas conexiones que se usaron en esta página para visualizar el giro
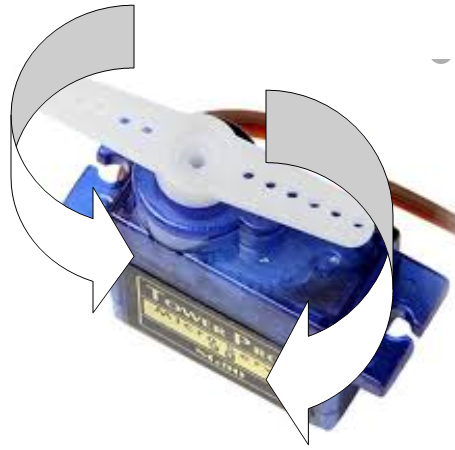
Servos
El servo es un motor donde fijamos el ángulo que queramos
- Cable marrón a GND
- Cable rojo a +5V
- Cable amarillo a una salida digital por ejemplo D9
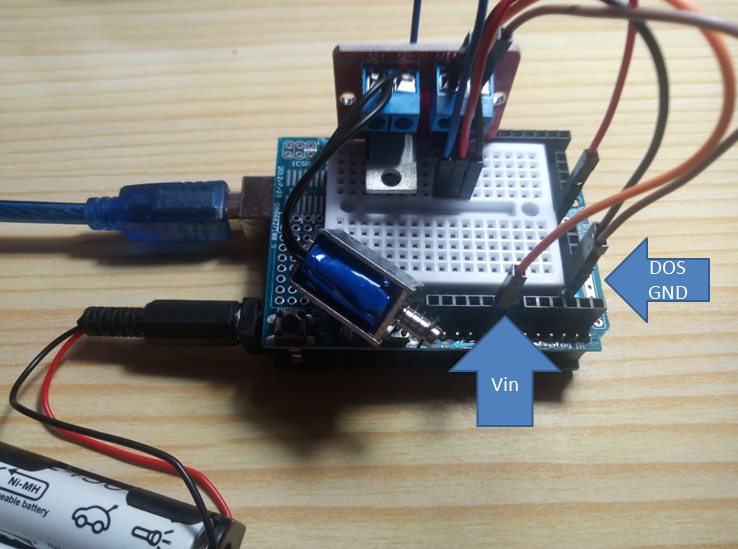
Electroimán
El electroimán no se puede conectar diréctamente, utilizaremos un transistor el IRF520N que amplifique la señal del Arduino, pues no tiene potencia para mover el electroimán
Para dar esa potencia utilizaremos otra fuente externa, unas pilas:
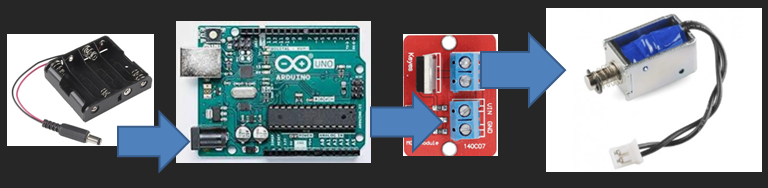
Las conexiones son :
- SIG del IRF520N a una salida digital por ejemplo D13
- VCC del IRF5020N al 5V del ARDUINO
- Los dos GND del IRF520N a GND del ARDUINO
- V+ y V- del IRF5020N al solenoide (da igual el orden)
- VIN del IRF520N al VIN del ARDUINO (son los voltios de la pilas)
Paso a paso
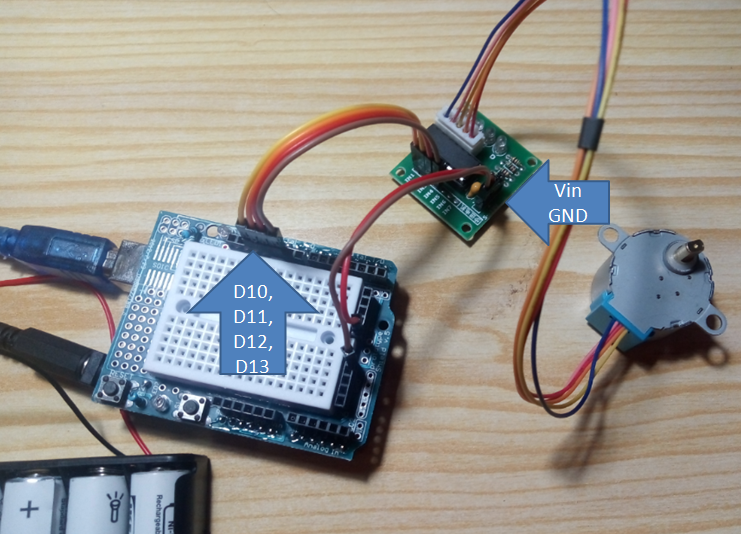
Igual que el electroimán, necesitamos un controlador que nos de la potencia necesaria para mover el motor, el ULN2003
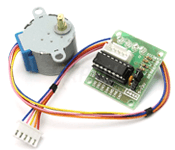
Imagen BY-NC-SA de Luis Llamas
También igual que el electroimán, necesitamos una potencia extra con las pilas:
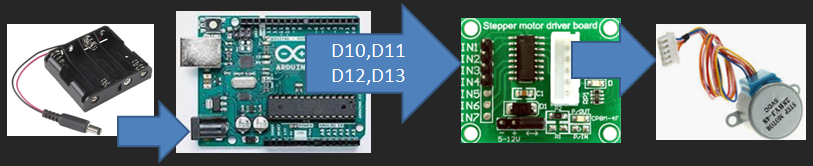
Conexión
- Cuatro pines digitales del ARDUINO al IN1,IN2,IN3,IN4 del ULN2003 por ejemplo D10,D11,D12,D13
- El conector blanco del ULN2003 al motor paso a paso
- El (+) del ULN2003 al Vin del ARDUINO
- El (-) del ULN2003 al GND del ARDUINO
Programación TEORIA
Utilizaremos la configuración sencilla en fase1 es decir:
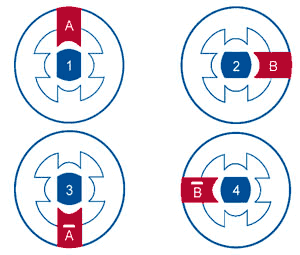
Imagen BY-NC-SA de Luis Llamas
Es decir:
| Paso | IN1=D10 | IN2=D11 | IN3=D12 | IN4=D13 |
|---|---|---|---|---|
| Paso 1 | ON | OFF | OFF | OFF |
| Paso 2 | OFF | ON | OFF | OFF |
| Paso 2 | OFF | OFF | ON | OFF |
| Paso 2 | OFF | OFF | OFF | ON |
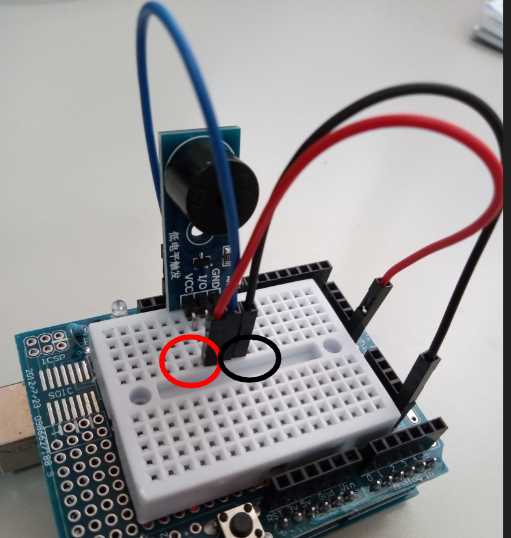
Buzzer activo
No tenemos que asociar actuadores como movimiento, sino como salida del Arduino.
La diferencia de un buzzer activo con el pasivo es que no es necesario enviarle pulsos para que emita una frecuencia, sólo tenemos que dar la orden y él reproduce un tono.
Conexión
- GND a GND y VCC a 5V (ojo que están a los dos extremos, marcados en rojo y en negro)
- OUT a un pin digital, por ejemplo D13