ROBOTS LICITACIÓN ESCUELA 40
Se utiliza la misma nomenclatura que la licitación Escuela 4.0 oct25
- Cuadro resumen
- Paquetes de Escuela 4.0 Agrupados
- R3 Vincibot
- R6 LEGO Spike
- R8 Microbit
- R9 Echidna
- R10 STEAMAKERS ESP32
- R12 Robots Makeblock mBot2 Cyberpi PROGRAMA mBlock 5-0 y mLink
Cuadro resumen
CUADRO RESUMEN ROBOTS LICITACIÓN ESCUELA 40
Se utiliza la misma nomenclatura que la licitación Escuela 4.0 oct25(opens new window)
| ID | Robot | Vitalinux Play | Via web | Observaciones |
|---|---|---|---|---|
| R1 | Talebot | |||
| R2 | Bluebot | |||
| R3 | Vincibot | SI | Necesita modificar reglas de udev | |
| R6 | Lego Spike | |||
| R7 | Cutebot | Se trata igual que la Micro:bit | ||
| R8 | Micro:bit | NO | SI | |
| R9 | Echidna | SI | NO | |
| R10 | ESP32 StemMkr | SI (connector) |
SI | Necesita connector para funcionar el programa via web |
| R11 | SmartHome Mcr | Se trata igual que la Micro:bit | ||
| R12 | mBot2 | SI (mLink) |
SI | Necesita mLink para funcionar el programa via web |
| R13 | Photon |
Paquetes de Escuela 4.0 Agrupados
¿Para qué sirve esto?
En Vitalinux se han preparado 4 paquetes que engloban el software necesario para trabajar con los materiales (robots, impresoras 3D...) que llegan a los centros con la licitación de la Escuela 4.0. Se organizan según la asignación de recursos del programa.
Primaria 1 vx-dga-l-escuela40-primaria1
- MatataCode Studio (editor para Vincibot / R3)
Primaria 2 vx-dga-l-escuela40-primaria2
- MakeCode (Micro:bit / R8)
- Arduinoblocks / Snap4Arduino (Echidna Black / R9)
Secundaria vx-dga-l-escuela40-secundaria
- MakeCode (Micro:bit / R8)
- mBlock (mBot2 CyberPi / R12)
- Arduinoblocks (ESP32 TDR Steam / R10)
Centros CRIE vx-dga-l-escuela40-crie
- PrusaSlicer (Impresora 3D / M1)
- Meshlab (Para trabajar con los mesh de los escaneadores 3D)
Nota: Los paquetes se instalan desde el Play de Vitalinux. Cada centro solo necesita informar al coordinador si quiere instalar un paquete para asignarle una instalación automática, o instalar el paquete manualmente que corresponde a su kit asignado.
Toda esta información hace referencia a la licitación de Escuela 4.0
R3 Vincibot
Uso de VinciBot en Vitalinux
Vitalinux incorpora soporte para trabajar con el robot VinciBot dentro del marco de Escuela 4.0, permitiendo programarlo directamente desde el editor oficial de MatataStudio sin necesidad de instalar software adicional. Esta integración facilita al profesorado la preparación de actividades de robótica educativa de forma sencilla, estable y compatible con el equipamiento de los centros.
La programación de VinciBot se realiza mediante el editor oficial disponible en:
https://vinci.matatastudio.com
Mas información en el siguiente libro de CATEDU Libreria CATEDU - Vincibot
El editor funciona directamente en el navegador, no requiere registro y es totalmente compatible con Vitalinux.
En Vitalinux, el acceso se encuentra dentro del menú Escuela 4.0, donde se incluye un enlace directo al editor.
Para que el profesorado pueda transferir programas al robot, es imprescindible:
-
Que VinciBot esté encendido.
-
Que esté conectado al equipo mediante cable USB.
-
Que Vitalinux haya aplicado correctamente los permisos udev necesarios para acceder al dispositivo.
Si tienes migasfree, Vitalinux configura automáticamente estos permisos al instalar el editor, de modo que el robot puede comunicarse sin necesidad de acciones adicionales por parte del profesorado.
Métodos de carga del programa en el robot
El editor de VinciBot permite cargar programas directamente al robot siempre que esté encendido y conectado.
Carga directa desde el editor
Con el robot conectado por USB y encendido, el editor permite enviar el programa directamente.
Pasos generales:
-
Encender VinciBot.
-
Conectarlo al equipo mediante USB.
-
Abrir el editor en https://vinci.matatastudio.com
-
Crear o abrir un proyecto.
-
Pulsar Upload (o el botón equivalente según idioma).
-
Esperar a que el editor detecte el robot y complete la transferencia.
[IMAGENES A AÑADIR]
Actualización del firmware desde el editor
VinciBot permite actualizar su firmware directamente desde el editor oficial. Esta función es especialmente útil en entornos educativos, ya que garantiza que todos los robots del aula estén sincronizados y funcionando correctamente.
Cómo actualizar el firmware
-
Encender el robot.
-
Conectarlo al equipo mediante USB.
-
Acceder al editor: https://vinci.matatastudio.com
-
Abrir el menú de configuración del dispositivo.
-
Seleccionar Actualizar firmware.
-
Esperar a que el proceso finalice sin desconectar el robot.
El editor se encarga de todo el proceso, incluyendo la verificación de la versión instalada.
[IMAGENES A AÑADIR]
Permisos udev en Vitalinux
Para que el robot pueda comunicarse con el sistema, Vitalinux aplica automáticamente las reglas udev necesarias. Estas reglas permiten:
-
Detectar el robot al conectarlo.
-
Autorizar la comunicación USB sin privilegios de administrador.
-
Garantizar que la carga de programas funcione en todos los equipos del centro.
Este proceso se realiza de forma transparente. En caso de que un robot no sea detectado, basta con:
-
Desconectar y volver a conectar el cable USB.
-
Comprobar que el robot está encendido.
-
Reiniciar el navegador si fuera necesario.
R6 LEGO Spike
OPCIÓN CONEXIÓN POR CABLE USB
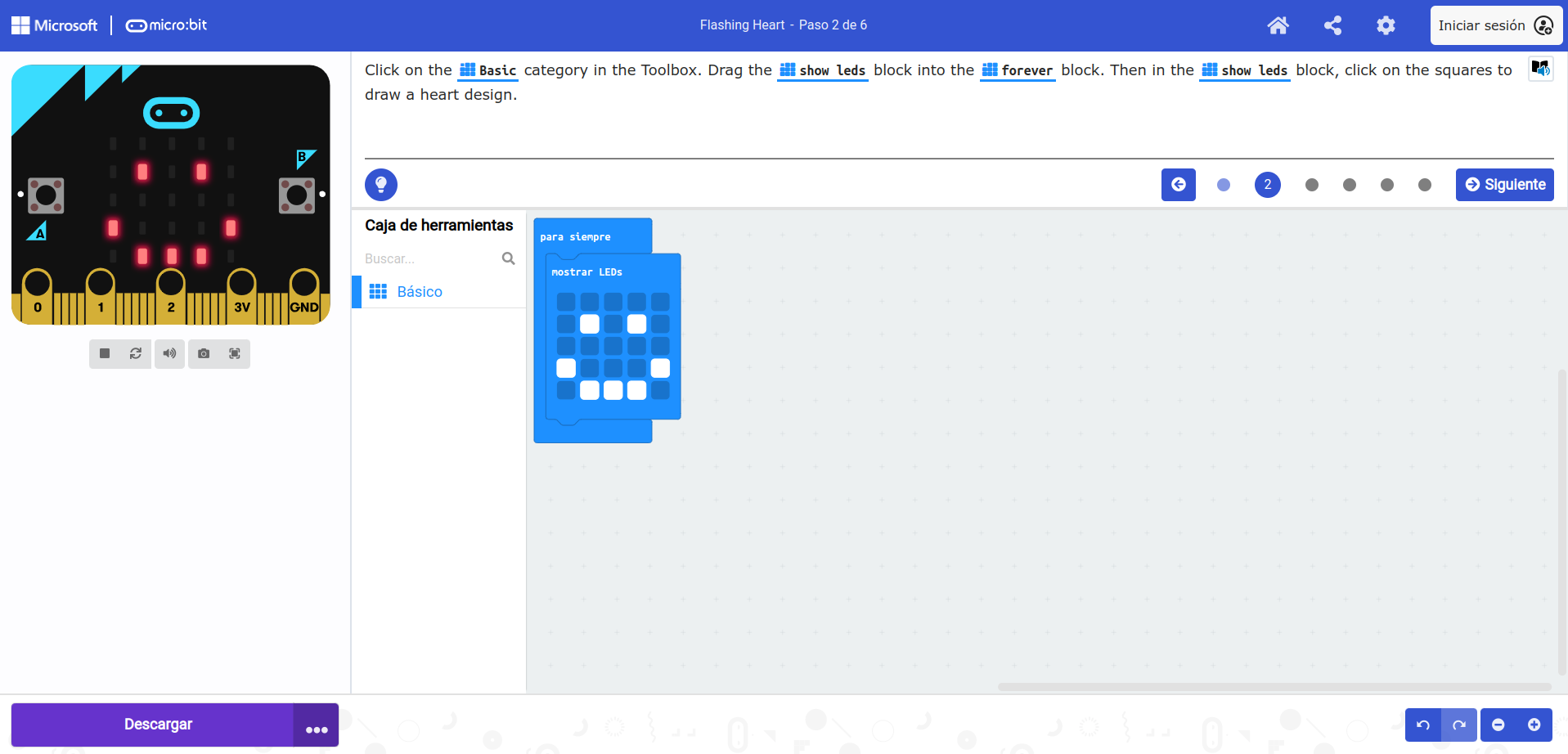
Para programar este LEGO SPIKE entramos en la web https://spike.legoeducation.com/ (opens new window)y nos pide elegir Basic o Prime, dependiendo del paquete a usar, los dos usan el mismo HUB
Y una vez dentro del reto en la ventana de programación pide conectarse al HUB.
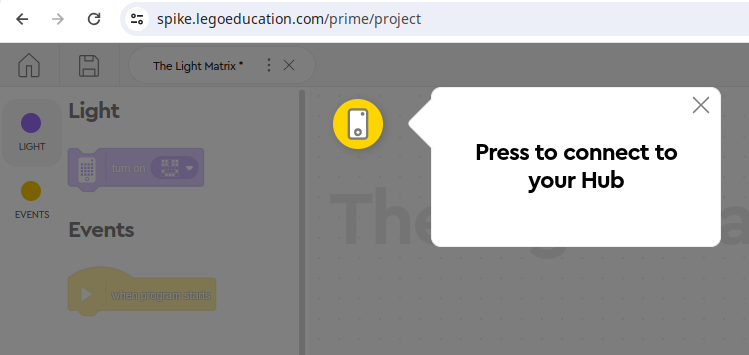
Seguimos las instrucciones utilizando la conexión por cable:
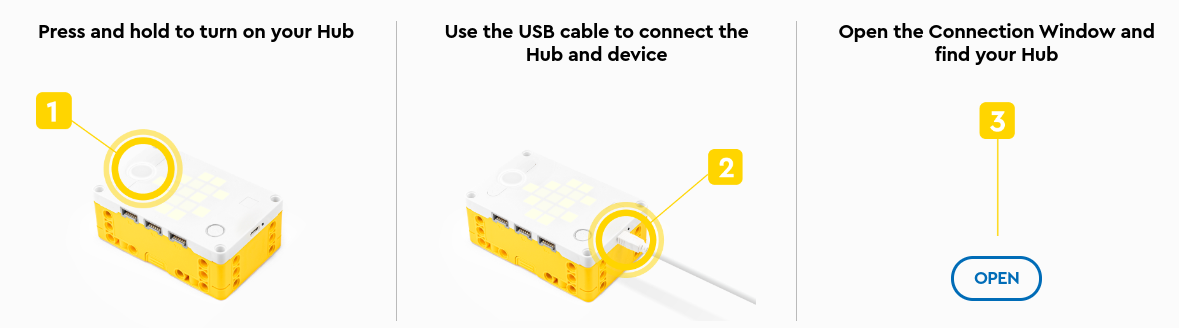
Y al dar a open nos pide permiso para conectarse al puerto:
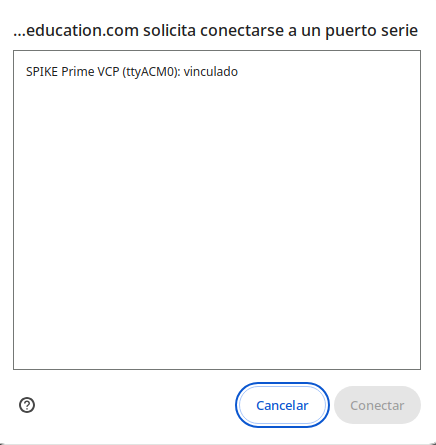
Y ya podemos jugar !!! https://youtu.be/1yJ2oHeeq28(opens new window)
OPCIÓN POR BLUETOOTH
Puedes solicitar en https://soporte.vitalinux.educa.aragon.es/ un lanzador de "chrome" o "chromium" especial que abra el navegador con estas dos características habilitadas:
- Web Bluetooth
- Experimiental Web Platform features
Puedes indicar en la solicitud qué nombre quieres poner al lanzador incluso puedes añadirnos un icono de un robot o similar para el lanzador para que los alumnos lo tengan fácilmente identificable y en qué aula (indica la etiqueta, por ejem SALASINF )
Si no nos indicas un icono le pondremos este:
Y de página de inicio iría a https://spike.legoeducation.com/
Con ese lanzador ya conecta de maravilla
R8 Microbit
Uso de Micro:bit en Vitalinux
Vitalinux incorpora una integración específica para trabajar con placas BBC Micro:bit dentro del apartado Escuela 4.0, permitiendo programarlas sin instalar software adicional. Esta integración facilita al profesorado la preparación de actividades de programación, robótica y pensamiento computacional de manera sencilla y estable.
La programación de las placas Micro:bit se realiza mediante el editor oficial MakeCode, accesible desde:
El editor funciona directamente en el navegador, no requiere registro y es totalmente compatible con Vitalinux.
En Vitalinux, el acceso se encuentra dentro del menú Escuela 4.0, donde se incluye un enlace directo al editor.
Métodos de carga del programa en la placa
Carga directa desde el editor
Con la placa conectada por USB, MakeCode permite enviar el programa directamente a la Micro:bit desde el propio navegador.
Pasos generales:
-
Conectar la placa al equipo mediante USB.
-
Crear o abrir un proyecto en MakeCode.
-
Pulsar Descargar y seleccionar cargar directamente en la placa.
-
Esperar a que el editor detecte la Micro:bit y complete la transferencia.
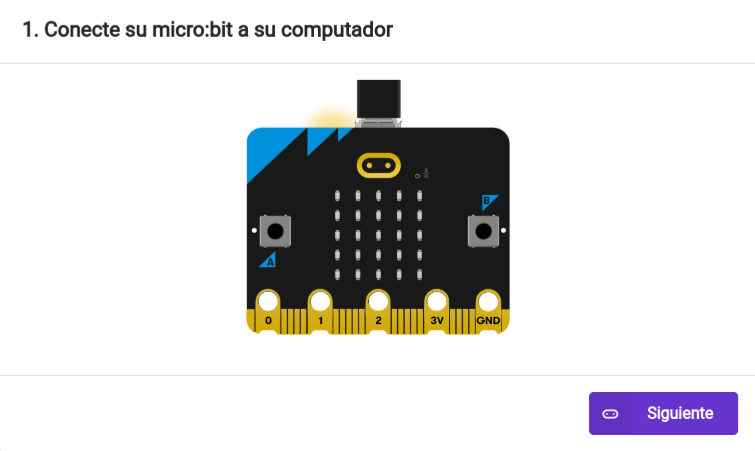

Pasos correspondientes a la carga directa desde el editor
Descarga del archivo .hex y copia manual
Como alternativa, es posible descargar el archivo compilado y copiarlo manualmente en la placa, que aparece en el sistema como un dispositivo de almacenamiento.
Pasos:
-
Pulsar Descargar en MakeCode.
-
Guardar el archivo
.hex. -
Copiarlo en la unidad correspondiente a la Micro:bit.
(Imagen del proceso de descarga como archivo)
Este método es útil cuando la carga directa no está disponible o cuando se trabaja con varias placas.
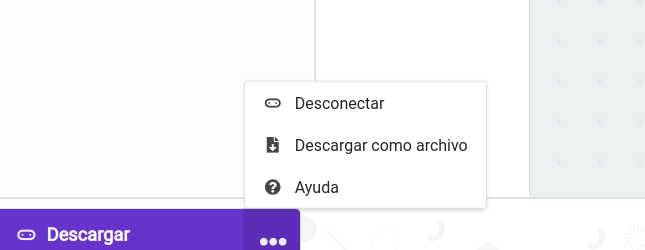
En vez de descargar a la placa, se puede descargar como archivo
Comprobación y actualización del firmware
Para garantizar la compatibilidad con MakeCode y la carga directa, la placa debe tener un firmware superior a la versión 0249.
Cómo comprobar la versión
-
Conectar la Micro:bit al equipo.
-
Abrir la unidad que aparece en el sistema.
-
Consultar el archivo DETAILS.TXT.
-
Buscar la línea donde aparece la versión del firmware.
En el ejemplo mostrado, la placa tiene la versión 0241, por lo que requiere actualización.
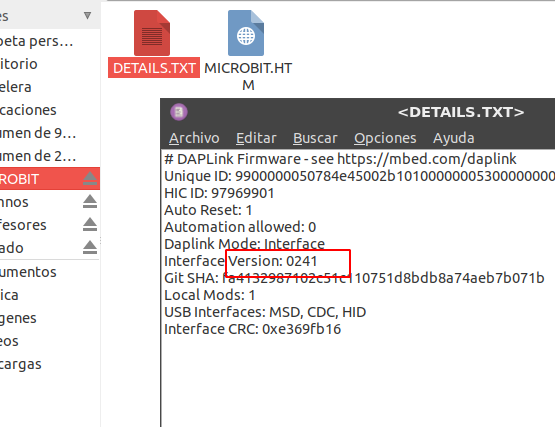
(Imagen del archivo DETAILS.TXT con la versión)
Cómo actualizar el firmware
En la página oficial de MakeCode se ofrece un procedimiento sencillo para actualizar la placa si la versión es inferior a la recomendada.
Enlace: https://makecode.microbit.org
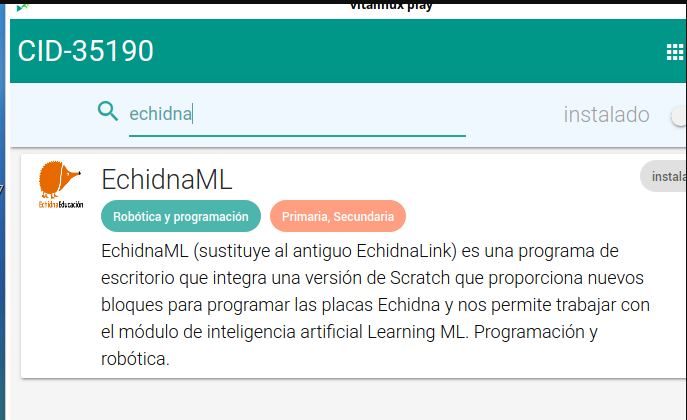
R9 Echidna
- Instalamos el software desde VitalinuxPlay
-
Conectamos la placa Echidna en el puerto USB
-
Ejecutamos EchidnaML (lo tienes en la carpeta "Educación"), el programa detecta la placa y funciona perfectamente
R10 STEAMAKERS ESP32
STEAMAKERS BLOCKS es una aplicación online que lo apoya Innovadidactic y que nos permite conectarnos con diferentes placas:
- Arduino
- ESP32
- Estas mismas placas con el escudo ImaginaSTEAM ...
Necesita la aplicación Connector. Podemos instalarlo desde Vitalinux Play. Sirve para comunicar la aplicación online con la placa que conectamos en nuestro equipo.
Se nos abrirá automáticamente el navegador con la página abierta de la aplicación online https://www.steamakersblocks.com(opens new window)
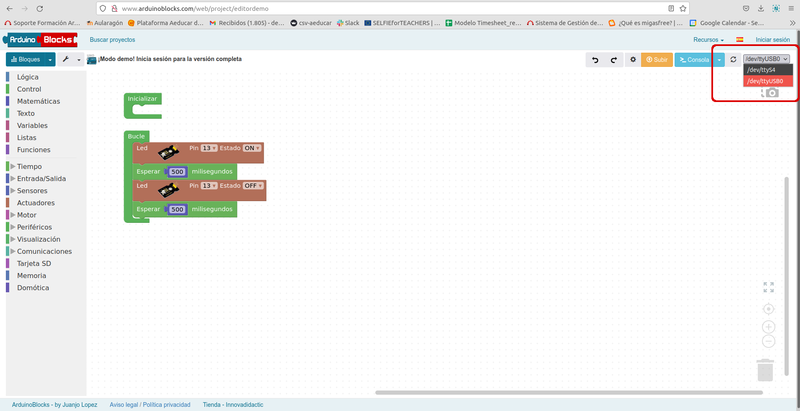
Una vez dentro de la aplicación y registrados, solo habremos de seleccionar el puerto USB en el que tengamos conectada nuestra placa y a funcionar, creamos el programa en bloques y Subir.
R12 Robots Makeblock mBot2 Cyberpi PROGRAMA mBlock 5-0 y mLink
mBlock 5-0 y mLink puede utilizarse aparte de para programar mBot2, para muchas otras placas:
- Cyberpi
- mBot1
- Echidna mejor utilizar EchidnaML
- Arduino UNO....
En SO Linux como Vitalinux es necesario :
- Instalar mLink Este programa está disponible en Vitalinux Play. Es un programa que tiene que estar funcionando para que el navegador se comunique con la placa
- Utilizar la versión online disponible en https://ide.mblock.cc/(opens new window)
Luego lo primero instala mLink desde Vitalinux Play :

Una vez instalado, seguir estos sencillos pasos:
- Conecta la placa al ordenador
- Arranca el mLink instalado previamente y no lo cierres, minimízalo.
- Arranca un navegador compatible con Chrome y accede a la web https://ide.mblock.cc (opens new window). Puede ser Chromium también.
En esta página web https://ide.mblock.cc (opens new window)le damos a conectar y elegir el puerto USB (suele ser el último, ver imagen)

Una vez conectado, ya proceder como normalmente.
Notas: Al ejecutar mLink, saldrá una ventana de comandos QUE NO TENEMOS QUE CERRAR dejarla minimizada. OJO PRIMERO MLINK Y LUEGO MBLOCK
Start mlink: Running...
Version: 1.2.0
** Notas mBot Con pincho Bluetooth **
Hemos probado inalámbricamente con el pincho Bluetooth (no lo inocorpora la licitación Escuela 40), y trabajar en vivo como cargar y funciona correctamente.