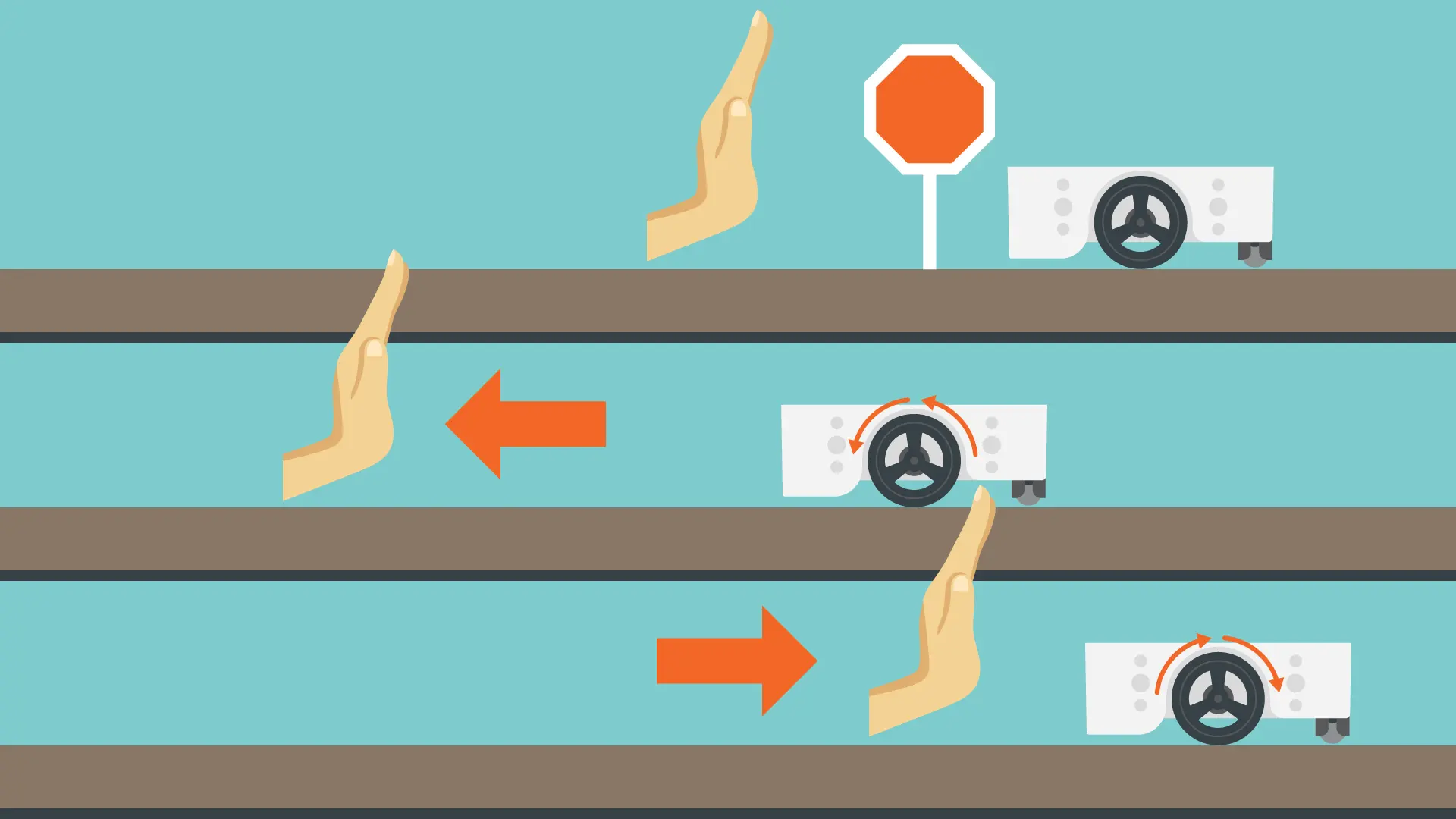
Control con la mano
Aquí trataremos de hacer que ALVIK responda a la posición de nuestra mano a través de el sensor ultrasonidos que tiene en frente suyo. Tendrá que intentar permanecer en una distancia intermedia con lo que tiene enfrente suyo.
from arduino_alvik import ArduinoAlvik
from time import sleep
import sys
alvik = ArduinoAlvik()
alvik.begin()
sleep(5)
#ESTABLECER VELOCIDAD
speed = 30
#IMPRIMIR VALORES Y ESTABLECER VARIABLES
while True:
try:
center = alvik.get_distance_top()
print(center)
sleep(0.01)
#Si la mano esta cerca, Alvik se va hacia atras
if center <= 12:
alvik.set_wheels_speed(-speed, -speed)
#Si la mano esta lejos, Alvik se acerca
elif center <= 30 and center >= 18:
alvik.set_wheels_speed(speed, speed)
#Si la mano esta en una distancia de 12-18, Alvik se queda quieto
else:
alvik.set_wheels_speed(0, 0)
#INTERRUPCIÓN DEL USUARIO
except KeyboardInterrupt as e:
print('over')
alvik.stop()
sys.exit()