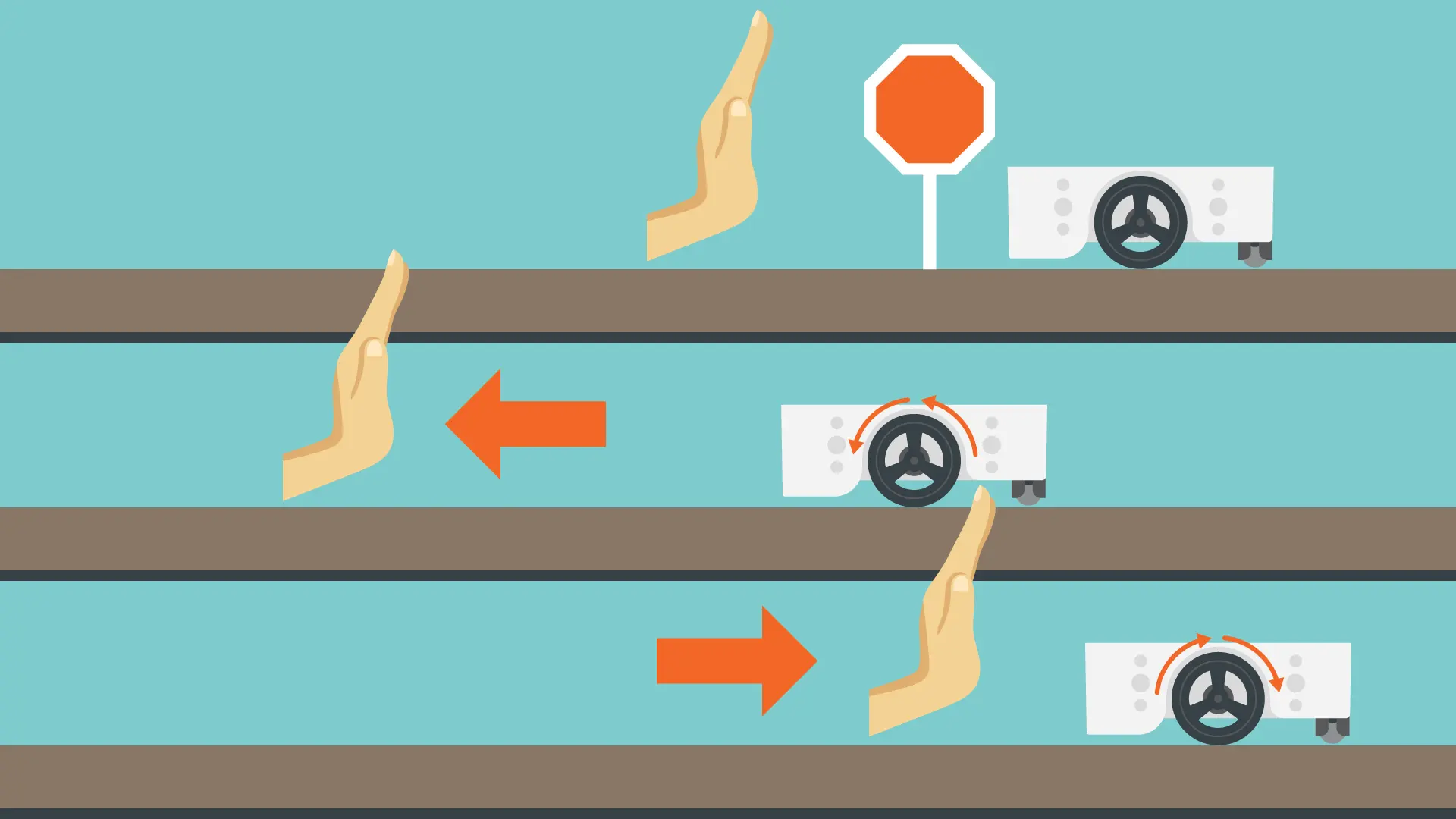
Control con la mano
Aquí trataremos de hacer que ALVIK responda a la posición de nuestra mano a través de el sensor ultrasonidos que tiene en frente suyo. Tendrá que intentar permanecer en una distancia intermedia con lo que tiene enfrente suyo.
ESTE PROGRAMA ESTA POR DEFECTO (marcado con el led verde) cuando instalas el firmware). Ver https://libros.catedu.es/books/arduino-alvik/page/que-es-arduino-alvik
 Fuente https://docs.arduino.cc/tutorials/alvik/getting-started/ AuthorJose Garcia CC-BY-SA
Fuente https://docs.arduino.cc/tutorials/alvik/getting-started/ AuthorJose Garcia CC-BY-SA
from arduino_alvik import ArduinoAlvik
from time import sleep
import sys
alvik = ArduinoAlvik()
alvik.begin()
sleep(5)
#ESTABLECER VELOCIDAD
speed = 30
#IMPRIMIR VALORES Y ESTABLECER VARIABLES
while True:
try:
center = alvik.get_distance_top()
print(center)
sleep(0.01)
#Si la mano esta cerca, Alvik se va hacia atras
if center <= 12:
alvik.set_wheels_speed(-speed, -speed)
#Si la mano esta lejos, Alvik se acerca
elif center <= 30 and center >= 18:
alvik.set_wheels_speed(speed, speed)
#Si la mano esta en una distancia de 12-18, Alvik se queda quieto
else:
alvik.set_wheels_speed(0, 0)
#INTERRUPCIÓN DEL USUARIO
except KeyboardInterrupt as e:
print('over')
alvik.stop()
sys.exit()
No comments to display
No comments to display