3.20. Pensamiento computacional: Los robots en el aula
En este apartado no veremos los elementos de un robot, ni sus piezas, ni como montar uno, eso lo dejamos para los cursos de robótica de Aularagon, o para las personas que se quieran aventurar en el mundo maker.
Así que por favor, si habéis puesto la misma cara que Spiderman (arriba)... ¡ya podéis respirar!
Lo que sí veremos serán distintos robots disponibles (no todos pues hay muchos), y formas de aplicar la robótica en el aula con ejemplos de distintos centros de Aragón que lo realizan desde hace unos años.
Robots
Desde que se comenzaron a usar los robots en las aulas de infantil, ha habido muchos cambios y evoluciones. Esto no quiere decir que tenemos que dejar abandonados los primeros que comenzaron a usarse, sino que el abanico se ha abierto tanto, que tenemos la suerte de poder elegir el que se adapte mejor a lo que queramos trabajar, a nuestro alumnado, y sí, al presupuesto que tengamos o que podamos gastar. Aunque todos se basan en la programación de secuencias.
Beebot
La clásica abejita con los controles en la cabeza. Para programar secuencias sencillas en 4 direcciones (izquierda, derecha, arriba,
abajo), con botón de ejecutar, borrado antes de programar otra nueva y pausa. La alfombra por la que se desplaza consta de una cuadricula. Esta se puede comprar también con bolsillos transparentes para introducir tarjetas, o se pueden crear con las imágenes o conceptos que se quieran.
Las nuevas Beebot interactúan entre ellas al acercarse con un pitido, y pueden grabar y reproducir audio. Han desarrollada una aplicación pero sólo para iOS, no para Android.

Fuente:Ro-botica: https://ro-botica.com
bot 
Fuente:Ro-botica: https://ro-botica.comBee bot
Los hermanos más asequibles: Ratón robot
Code and go es un robot con forma de ratón cuyo funcionamiento es igual que el Beebot. Compuesto por una botonera en la parte superior para ejecutar las mismas directrices.

Fuente: amazon.esAmazon
En el mercado existen numerosos robots de similares características con distintos diseños como Super Doc, entre otros.
Escornabot: El hermano maker
Si no podéis gastar mucho dinero y os apetece montar vuestro propio robot haciendo incluso partícipes a los alumnos y alumnas, el Escornabot es una buen opción. Su funcionamiento es exactamente igual que el Beebot pero sin carcasa.

Fuente:Pablo https://pablorubma.ccRubio: Pon un Escornabot en tu vida
Todas su piezas están a la vista. El niño puede ver los movimientos qué hace y las uniones entre ellos. Además pertenece a un proyecto gallego de código abierto. Es decir, se pueden adaptar sus características a las necesidades que uno tenga. Tanto las piezas necesarias como el manual de montaje es totalmente libre y accesible para cualquier persona. Así como los materiales básicos para comenzar a usarlo en el aula, creando así una red de recursos y colaboración entre docentes.
Libre no quiere decir gratis, pero sí más barato y lo puedes arreglar si se estropea tu mismo.
Aquí podéis conocer el proyecto completo y todo lo necesario para su montaje.
En nuestra comunidad contamos de forma totalmente desinteresada con Pablo Rubio, un apasionado por el software libre que recopila en su web información sobre el robot, dónde conseguir las piezas y su montaje. Accede a su web aquí.

Fuente:Pablo https://pablorubma.ccRubio: Pon un Escornabot en tu vida
Nuevos robots
Las nuevas generaciones de robots que han ido sacando distintas marcas cuentan con distintos elementos que buscan diferenciarse entre ellos mediante pequeños cambios o mejoras. En su gran mayoría cuentan con una plataforma, de pago, con propuestas didácticas, y distintos tapetes o alfombras además de paquetes extra en algunos casos.
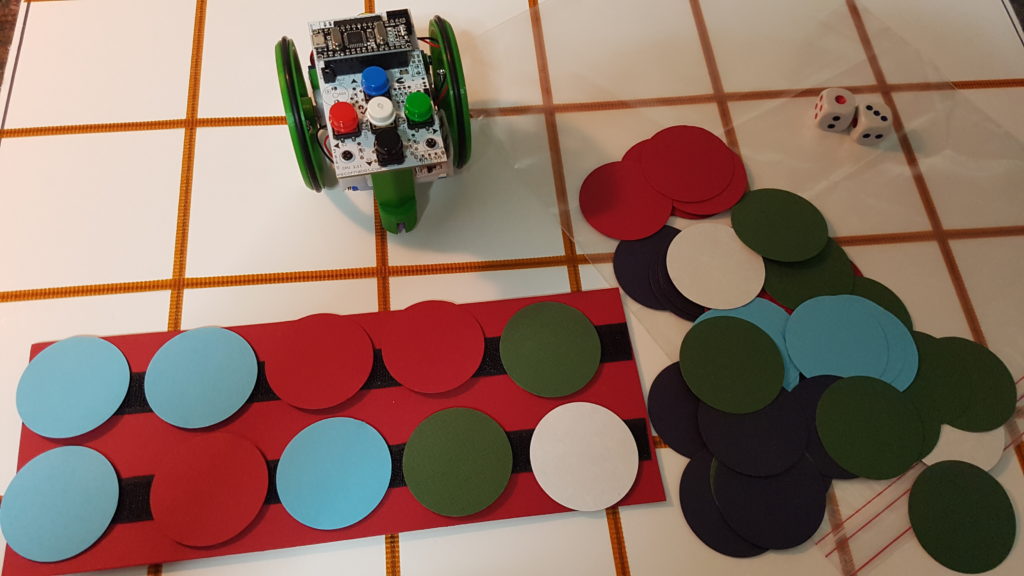
Cubetto
Cubetto es un robot que consta de dos componentes: el tablero de programación y el robot.
El tablero permite que de forma manipulativa se cree la secuencia de programación colocando las fichas sobre este, para posteriormente presionar un botón y que el robot ejecute la secuencia programada.
Se distingue por los acabados en madera de los componentes y, por que el robot no tiene teclas de funciones como otros. La principal limitación es el número reducido de instrucciones que se pueden programar.

Fuente: https://cubetto.vicensvives.com/Cubetto
Tale bot
El robot Tale Bot es un robot que se programa a través de los botones de su parte superior.
Tiene distintos accesorios como:
- brazos para empujar objetos
- alas para dibujar con rotuladores
- 10 mapas interactivos
- tablero blanco
- o cartas de comandos entre otros

Fuente:Ro-botica: https://www.ro-botica.com/Tale bot
mTiny
mTiny como los anteriores robots apuesta por una propuesta más manipulativa, y se distingue por varias cuestiones:
- El robot no tiene botonera para programar
- El robot emite sonidos relacionados con las emociones y los ojos cambian con respecto a ellas. Además identifica los edificios del panel de la ciudad y suena acorde al edificio sobre el que se le coloque.
- La programación se hace con fichas facilmente manipulables usando los comandos como en la programación por bloques de Scratch. Una vez creada la secuencia se usa el boli para que lea cada una de las órdenes colocándolo encima de ellas, y el robot las realizará.

Fuente:Robotix: https://www.robotix.es/esmTiny
Fuente propia: Programando con mTiny
Tableros
Estos robots se mueven sobre tableros, alfombras o paneles que pueden ser comprados o de fabricación propia. Mediante estos tableros trabajaremos los conceptos o destrezas que queramos con el alumnado.
En infantil los tableros que se usan más habitualmente son los relacionados con la lógico-matemática. Incluyen caras de dados, figuras geométricas, números... pero podemos hacerlos sobre la temática que queramos y tan grandes como necesitemos.
La mayoría de robots suele venir con su propio tablero en la mayoría de los casos reversible. Aunque lo mejor, es hacerlo con el alumnado.
Es importante conocer la distancia del desplazamiento que hace nuestro robot, ya que eso determinará que podamos usar o no tableros ya creados. Por ejemplo el desplazamiento en centímetros del Beebot y del Escornabot es diferente.
Tableros Beebot
 Fuente: youtube.es Fuente: youtube.es |
Fuente: https://www.creciendoconmontessori.com/ |
| Tablero de números | Tablero de una ciudad o pueblo |

Tableros para Escornabot (enlaces en las imágenes)
 |
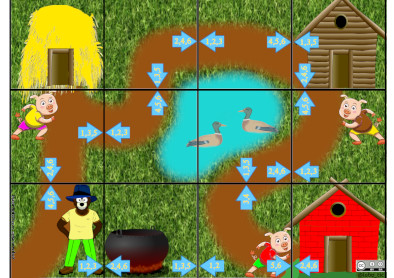 |
| Juego de Los 3 cerditos con instrucciones y materiales | |
|
|
|
|
Cuenta cuentos (uniendo varios tableros) Tablero 1. Tablero 2 |
|


Recopilatorio con tableros y actividades en el repositorio ofical de Escornabot realizado por Jorge Lobo.
Aplicaciones en el aula
Una vez vistos los distintos tipos de robots que podemos usar y su funcionamiento básico, veremos cómo otros docentes los han aplicado en el aula.
Intef
El Intef,Intef, tiene en su web sobre pensamiento computacional, Code Intef, mucha información y ayuda totalmente gratuita y fácilmente accesible.
Los apartados con los que cuenta son:
- Recursos, que incluye propuestas didácticas, experiencias de aula e informes que podemos filtrar por etapas educativas gracias a su buscador, incluyendo infantil.
- Formación en abierto, tutorizada y presencial.
- EPCIA, Escuela de pensamiento computacional e inteligencia artificial. Desde 2018, este proyecto ofrece formación y, recopila propuestas educativas llevadas a cabo por docentes en el aula.
- CodeWeek, propone y recopila actividades sobre la Semana del Código.
- ChicasSteam, ofrece noticias, iniciativas, recursos, e informes buscando dar visibilidad a las acciones que fomenten el interés de las niñas y mujeres en la ciencia.
- Iniciativas nacionales, internacionales y para los más peques.

Veamos una de las numerosas experiencias relacionadas con el uso de la robótica en el aula y la discapacidad visual.
Adaptación de tableros para trabajar la robótica educativa con alumnado con discapacidad visual
Esta experiencia fue realizada por la docente Rosa Garrido @rositamarytiflo
Las actividades llevadas a cabo fueron preparadas para alumnado con discapacidad visual o perdida total de la visión, y alumnado sin discapacidad visual. Aunque en el aula no tengamos a ningún niño con discapacidad visual, estas actividades pueden ser llevadas a la práctica de igual forma. Ofreciendo así a nuestros alumnos y alumnas una forma distinta de ver y enfrentarse al mundo, e incluso ayudándoles a superar dificultades, ya que en muchos casos no serán capaces de tolerar algunas texturas o situaciones.
OBJETIVOS DE LA EXPERIENCIA
- Crear materiales adaptados y accesibles al alumnado con dificultades visuales o discapacidad visual.
- Hacer un ejercicio de sensibilización e inclusión.
CONTENIDOS
Esta experiencia es sólo una vía para trabajar los contenidos que se deseen, aunque algunos contenidos implícitos son el conteo, discriminación de atributos (colores, texturas, formas, tamaños), la orientación espacial o el razonamiento lógico.
MATERIALES
- Gafas de simulación
- Robots de suelo: Escornabot, Matatalab, entre otros
- Distintos tableros
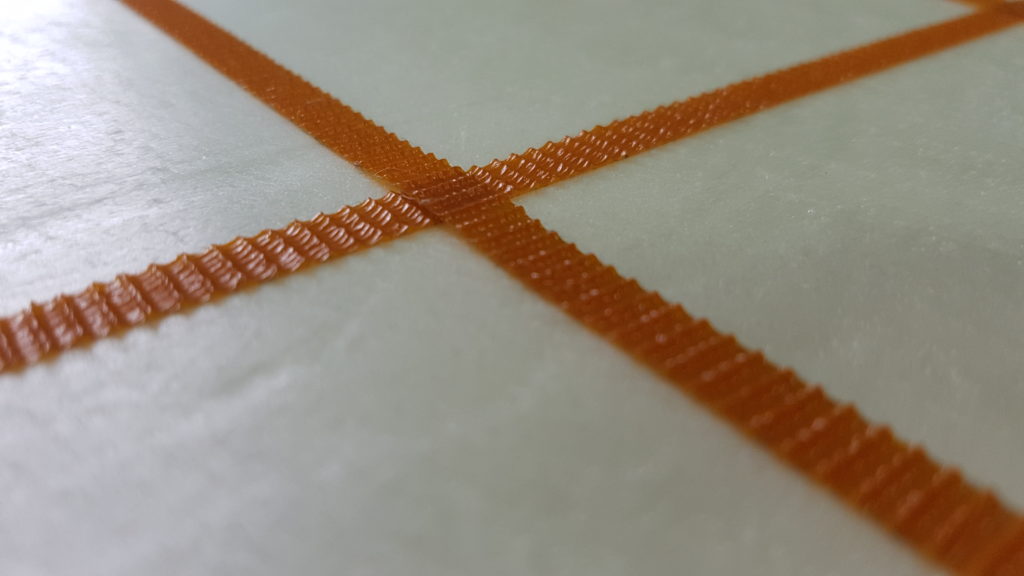
En la experiencia, trabajaron creando sus propios tableros y usando distintas texturas en cada casilla (fieltro, cartulina, metal, tela, porexpán..), delimitando el tablero con cinta con textura y usando elementos lo más cercanos a la realidad posibles. En los colores y textos usaron distintos colores, fuentes y contrastes.
 Intef
IntefFuente: Intef.. Foto: Rosa Garrido @rositamarytiflo
En los robots incluyeron pequeñas marcas que facilitaban la identificación de la parte delantera del robot con ojos o de las indicaciones en la botonera colocando flechas. En pasos más avanzados comenzaron a usar braille.

Secuencia de comandos en el robot Matatalab. Las fichas se etiquetan con flechas en braille. Fuente: Intef.Intef. Foto: Rosa Garrido @rositamarytiflo
DESARROLLO
Comenzaron trabajando con actividades desenchufadas, un alumno era el robot que se desplazaba por un tablero texturizado, y otro le indicaba las direcciones usando pulsadores con mensajes pregrabados (adelante, atrás, gira a la izquierda, gira a la derecha).

Tablero de suelo con distintos relieves. Fuente: Intef. Foto: Rosa Garrido @rositamarytiflo
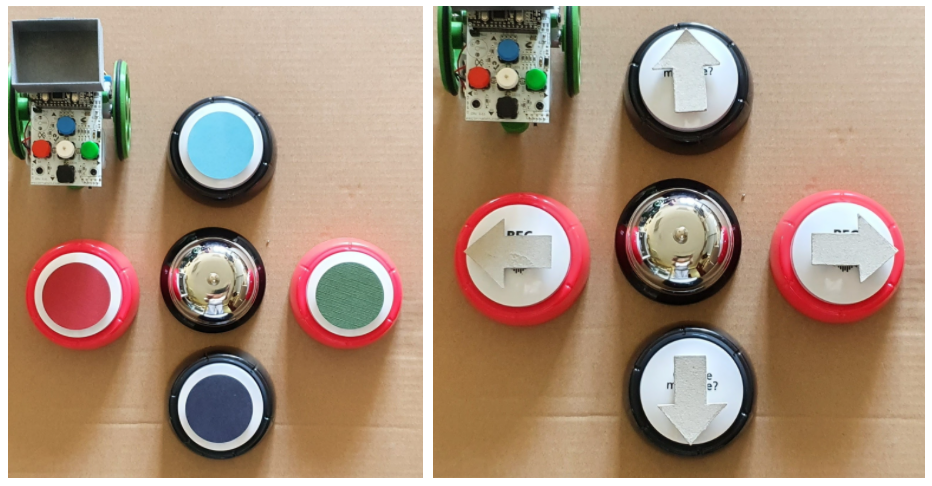
Tablero de control del robot, 4 pulsadores con audios pregrabados y timbre central. Al principio, se colocan ayudas visuales (círculos de colores) o táctiles (flechas de dirección) para facilitar la comprensión. Fuente: Intef.Intef. Foto: Rosa Garrido @rositamarytiflo
También usaron regletas con códigos de colores correspondientes a las direcciones de la botonera del Escornabot.
Secuencia de comandos con círculos correspondientes con las órdenes de la botonera del robot. Fuente: Intef.Intef. Foto: Rosa Garrido @rositamarytiflo
Toda la información de la experiencia aquí. Más actividades para infantil, aquí.
Actividades en centros aragoneses
En nuestra comunidad muchos son los centros y docentes que han implementado en sus programaciones el pensamiento computacional o que usan en el día a día de su aula los robots en momentos puntuales para trabajar algunos conceptos o destrezas.
Las matemáticas se aprenden tocando: talleres matemáticos
Esta propuesta de la maestra de infantil Mariluz Cervera se llevó a cabo en el CEIP Gaspar Remiro de Épila (Zaragoza) con el alumnado de 3º de infantil en talleres matemáticos dos veces a la semana, buscando el aprendizaje del alumnado de una forma vivencial y manipulativa. En este caso, en uno de los talleres sobre iniciación a la resta y la suma se usó como herramienta de aprendizaje el Beebot.
OBJETIVOS
Algunos de los objetivos planteados fueron:
- la resolución de problemas
- uso de las TIC como herramienta de aprendizaje de la lógico-matemática
- realizar conteos y operaciones simples, entre otros
CONTENIDOS
Entre otros se trabajó la numeración, la aproximación a la suma y la resta o el razonamiento y situación lógico espacial.
DESARROLLO
Cada sesión consta de dos partes: la primera en la que presentaba los materiales o la actividad en gran grupo y recordaba las normas, y la segunda en la que el alumnado experimentaba y manipulaba los materiales o actividades.
Durante el desarrollo de la actividad en la que en principio la circulación es libre, la docente delimitó algunas actividades con sillas para determinar el número de niñas y niños participantes. Intentando cuidar la presentación de los materiales y usando el espacio de forma estructurada y ordenada para que sea un elemento más de aprendizaje.
El papel de la docente en estas sesiones era de acompañamiento y observación, prestando ayuda y anotando la participación y los progresos.
En la imagen inferior aparece la propuesta de taller usando Beebot para trabajar la suma y la resta entre otros retos matemáticos.

Fuente: Blog experiencias del profesorado.profesorado. Foto: Mariluz Cervera
Podeis consultar toda la información de la experiencia (materiales, propuestas, evaluación...) aquí.
Las aventuras de Amalí:
Las aventuras de Amali del Blog de Experiencias del Profesorado
Las aventuras de Amalí es un proyecto colaborativo entre varios centros educativos nacionales: alumnos y alumnas de 3 y 4 años y maestra Carolina García de Ontinar de Salz del CRA Bajo Gállego, las niñas y niños con la maestra Cati Navaroo del CEIP San Agustín de Casas Ibáñez en Albacete y, el alumnado de 5 años y la maestra Carmen Meca del CEIP Purísima Concepción de El Esparragal, en Murcia.
Trabajando por rincones, podían dedicar uno de ellos a la robótica preparando retos semanales que tenía que superar el alumnado. Para ello disponían de dos robots: la Beebot y el ratón Code and go, o ratita Fresita, como la llamaban en el aula.
- Beebot y la familia de Amalí: Primera actividad
OBJETIVOS
- Discriminar e identificar los distintos miembros de la familia de Amalí
- Realizar su propio tablero de Beebot
- Establecer la casilla de salida de Beebot
- Orientarse en el tablero de Beebot
- Establecer distintos caminos a recorrer por Beebot para llegar a los miembros de la familia
- Programar distintas secuencias en Beebot
CONTENIDOS
- Familias del Mundo recogidas en el juego de cartas
- Orientación espacial básica: delante, detrás, izquierda, derecha
- Beebot y su manejo mediante la programación usando la botonera superior
DESARROLLO

Tablero diseñado por el alumnado del Blog de Experiencias del Profesorado
Las niñas y niños tenían que presentar Beebot a los miembros de la familia de Amalí. Para ello, usaron las cartas "Familias del mundo" y dibujaron en las casillas los personajes elegidos. Además de establecer la casilla de salida del Beebot.
Tras el diseño comenzaron la actividad: Seleccionaban una carta del montón boca abajo de las cartas de la familia bantú, localizaban el miembro en el tablero y programaban a Beebot para que llegará.
- Fresita y el poblado Tiebelé
OBJETIVOS
- Diseñar casas de decoración Tiebelé
- Desarrollar la coordinación óculo-manual
- Desarrollar la orientación espacial
- Orientarse en el tablero de Beebot
- Establecer distintos caminos a recorrer por el ratón Code and go para llegar a los miembros de la familia
- Programar distintas secuencias en el ratón Code and go
- Encontrar errores en la programación de Code and go, y buscar soluciones para corregirlo
CONTENIDOS
- Casas Tiebelé
- Orientación espacial básica: delante, detrás, izquierda, derecha
- Code and go, y su manejo mediante la programación usando la botonera superior
- Errores en la programación de secuencias y búsqueda de soluciones
DESARROLLO
El primer paso que tuvieron que hacer en esta actividad fue crear con materiales reciclados las casas Tiebelé en el rincón de arte. Después colocaban la casa elegida en el tablero y delimitaban el camino a recorrer por el robot con pompones. Sólo quedaba que los peques programaran el robot y observaran si había algún error en la delimitación del camino u obstáculo que implicase una reprogramación del robot.
Usaron también las tarjetas de comandos para programar.

Blog de Experiencias del Profesorado
Con estas sencillas actividades usaban los robots como herramientas para conseguir que las niñas y niños desarrollasen distintas destrezas y capacidades dentro de las actividades de un proyecto.
Podéis consultar toda la información de la experiencia (materiales, propuestas, evaluación...) aquí.
Para saber más: Escornabot como herramienta didáctica