Sigue líneas II
El contenido de esta página es de {{@12107#bkmrk-pere-manel-verdugo-z}}
Acuérdate que para manejar el sensor de distancia, hay que instalar la extensión correspondiente. Ver https://libros.catedu.es/books/cyberpi-y-mbot2/page/como-usar-mbot2-en-mblock
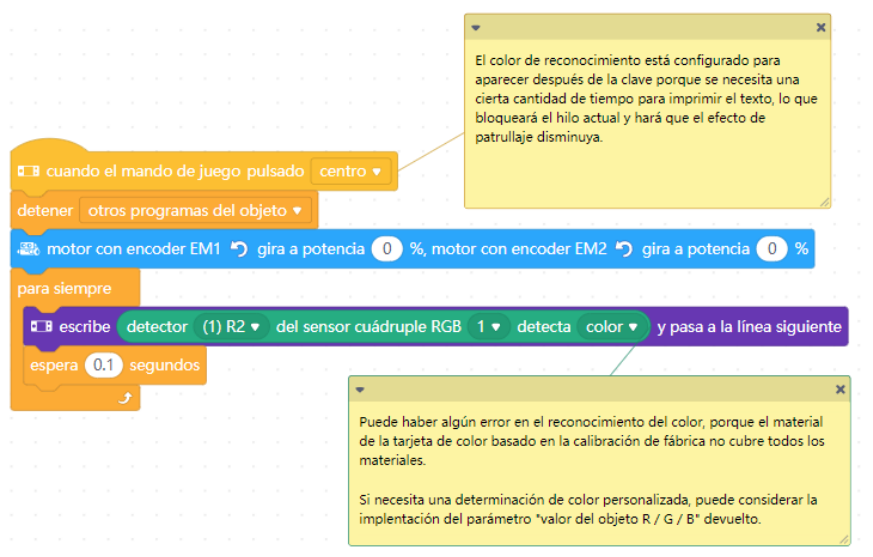
En este programa sigue líneas avanzado vamos a incorporar que nos vaya diciendo los colores que va detectando
El script que proponemos es el siguiente :
{{@12107#bkmrk-pere-manel-verdugo-z}}

{{@12107#bkmrk-pere-manel-verdugo-z}}
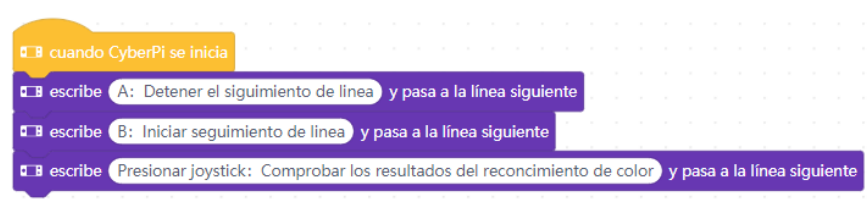
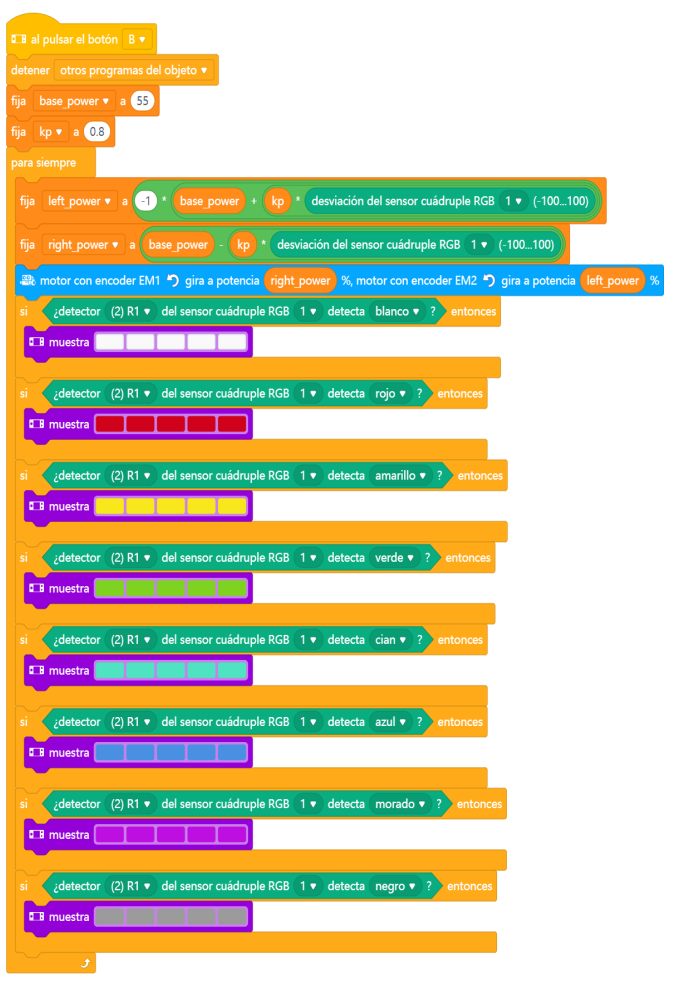
Y el algoritmo principal
- Cuando se presiona el botón B
- Detener otros programas del objeto.
- A la variable base_power le asignamos el valor 55
- A la variable kp le asignamos el valor 0.8
- Para siempre (Bucle infinito)
- A la variable left_power le asignamos el valor -1 * ( base_power + (kp * desviación del sensor cuádruple RGB)
- A la variable right_power le asignamos el valor(base_power – (kp * desviación del sensor cuádruple RGB)
- moto EM1 gira a potencia right_power %, motor EM2 gira potencia left_power %
- sí detector R1 del sensor cuádruple RGB detecta blanco entonces
- muestra 5 leds color blanco
- sí detector R1 del sensor cuádruple RGB detecta rojo entonces
- muestra 5 leds color rojo
- sí detector R1 del sensor cuádruple RGB detecta amarillo entonces
- muestra 5 leds color amarillo
- sí detector R1 del sensor cuádruple RGB detecta verde entonces
- muestra 5 leds color verde
- sí detector R1 del sensor cuádruple RGB detecta cian entonces
- muestra 5 leds color cian
- sí detector R1 del sensor cuádruple RGB detecta azul entonces
- muestra 5 leds color azul
- sí detector R1 del sensor cuádruple RGB detecta morado entonces
- muestra 5 leds color morado
- sí detector R1 del sensor cuádruple RGB detecta negro entonces
- muestra 5 leds color negro
{{@12107#bkmrk-pere-manel-verdugo-z}}
Y además (optativo) igual que el sigue líneas I :
{{@12107#bkmrk-pere-manel-verdugo-z}}