Montaje 15 Servo
Servo
El servo es un motor que podemos controlar el ángulo de giro, hay diferentes clases, pero nos vamos a centrar en este que tiene un precio/calidad aceptable,precio elmuy MG90S.barato: 
Este servo se controla con una salida digital, y se les indica el ángulo de giro,SG90 que puede irvaría desde 0º hastaa 180ª180º

Fuente permiteLuis otroLlamas márgen)CC-B-SA https://www.luisllamas.es/controlar-un-servo-con-arduino/
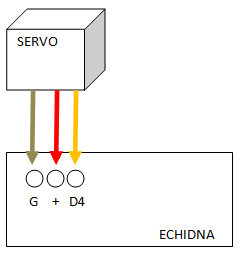
Conecta el servo con la Echidna
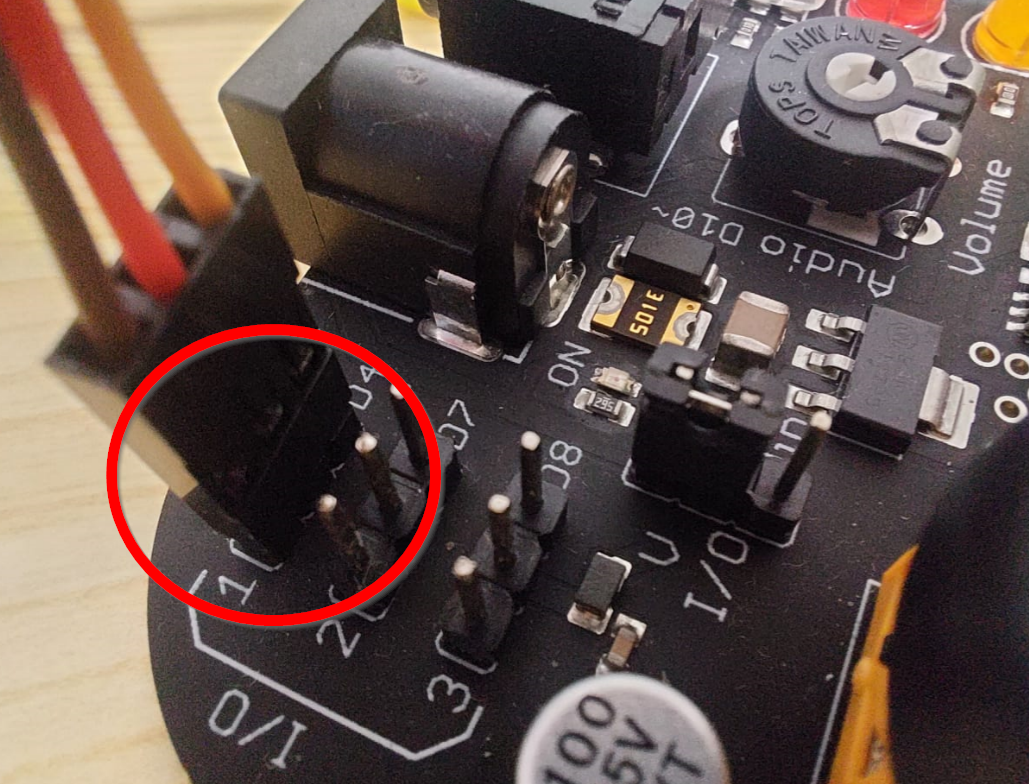
El servo tiene tres cables,, marrón, rojo, y amarilo machos, conéctalos a uno de los pines de las extensiones, por ejemplo al D4 marcado como 1. SiFíjate elegimosbien, otroel másmarrón barato,indica puedela tenermasa derivahacia el borde y el amarillo hacia la cara interior:
Experimenta con el servo
Entra en losEchidnaScratch, extremossaca (versu vídeoinstrucción a la palestra y haz dos cliks, experimenta con HD-144Avarios ángulos, verás que menores que lo mínimo es 0º y lo máximo 180º
)
Aprende más sobre servos en esta página de Luis Llamas.
Montaje 15 Servo
LaVamos instruccióna hacer un programa que el servo se mueva JUSTO EL MISMO ÁNGULO QUE LA PLACA ECHIDNA para losconseguir servosque el servo se mantenga en mBlocksu misma posicón.
Para ello hay que tener en cuenta que:
- La Echidna cuando no esta inclinada muestra un valor de 350º, vamos a llamarlo ángulo de inclinación
- El servo cuando está en su punto medio, el brazo está a 90º, vamos a llamarlo ángulo al valor que quiero que se mueva el brazo del servo
- Por lo tanto entre los dos variables será 350-90=260º
- Sí Ángulo es igual a inclinación menos esa diferencia 260 entonces tenemos que el servo se mantendrá constante en su posición
El programa es muy:
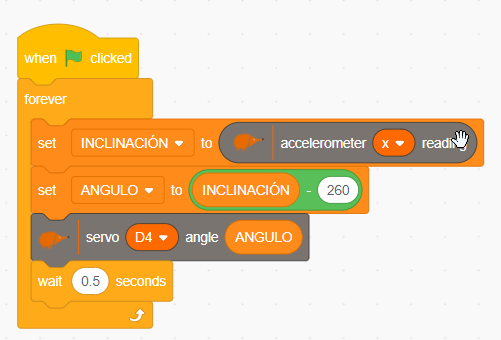
Se le indicamosañade un pequeño retardo de 0.5segundos pues se vuelve algo loco
El resultado es
Todos los programas de este curso se encuentran en quéeste pinrepositorio: digitalhttps://github.com/JavierQuintana/Echidna
Con conectadomBlock
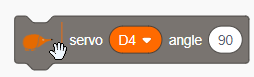
Para elexperimentar ángulotienes que deseamos:usar esta instrucción

y ponlo bien, el marrón indica la masa:
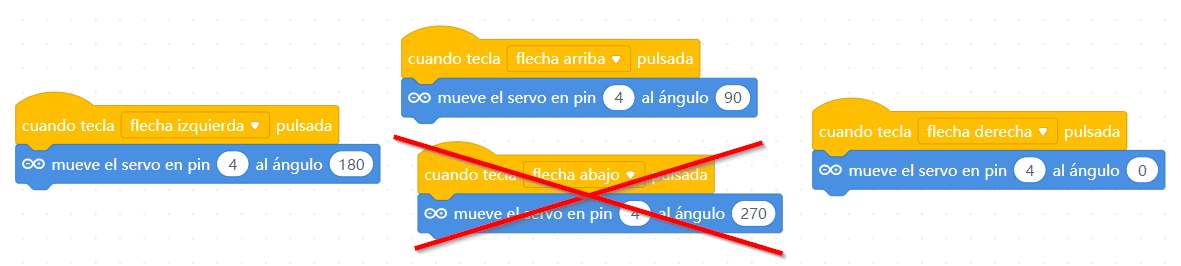
Si intentamos trabajar con el servo con ángulos mayores de 180ª no hace caso, va al valor 180ª. Si ejecutas este programa lo verás:
Mira la diferencia con un servo de rotación continúa, fíjate como:
- Los extremos 0º y 180º es a máxima velocidad, pero un sentido u otro.
- 90º es parado. - Un valor intermedio es menos velocidad (se ve el ejemplo 80º y 100º)
- Si tiene deriva, (cosa frecuente) hay un potenciómetro para ajustar.