Servo
Una de las aplicaciones más utilizadas de los sistemas de control por ordenador y en la robótica están asociados con los motores, que permiten accionar o mover otros componentes, como puertas, barreras, válvulas, ruedas, etc. Uno de los tipos que vamos a ver en este capítulo son lo servos, hay de dos tipos:
- El servomotor o servos convencionales que posee la capacidad de posicionar su eje en un ángulo determinado entre 0 y 180 grados en función de una determinada señal.
- Servo de rotación continua Son servos por fuera igual que los anteriores, pero pueden girar 360º y se controlan por tiempo
Por defecto cuando se dice servo, es un servomotor o servo convencional
Enunciado
Vamos a aprovechar el concepto de mapeo con el siguiente enunciado
Queremos que se mueva un servo motor (ángulo de 0º a 180º) en función del potenciómetro, conectado a GP27 por lo tanto sus valores van de 0 a 65535 (que es 2 elevado a 16)
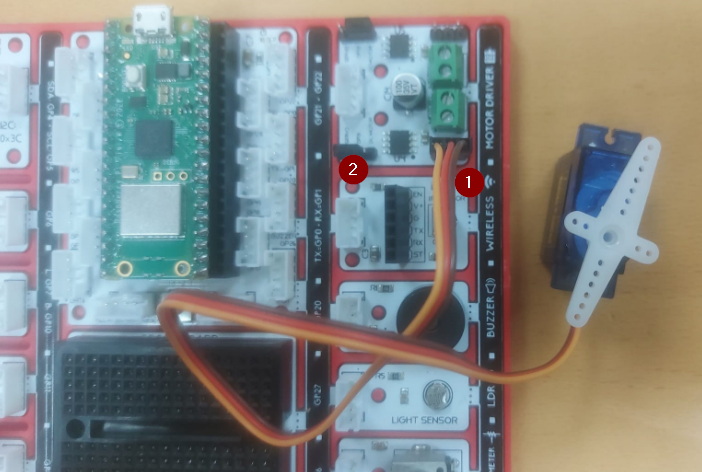
Hardware
- Conectamos un servo en el slot correspondiente
- Movemos el Jumper a la posición que conecte GP21 con Servo
Mapeo
Utilizaremos la situación G de mapeo https://libros.catedu.es/books/pico-bricks/page/mapeo
por lo tanto dividiremos la posición del potenciómetro por 364
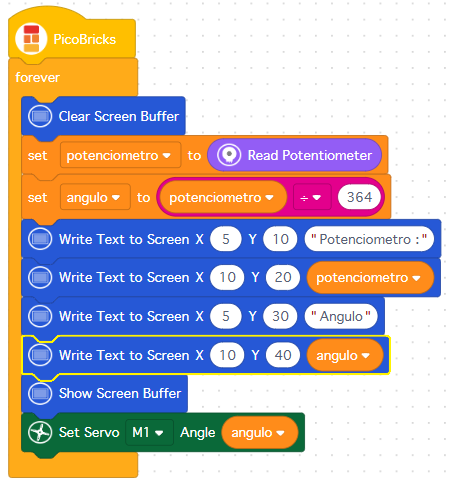
Software
El programa es el siguiente:
No utilizar esta instrucción 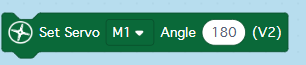
Resultado
Te atreves a... manejar dos servos, por ejemplo con el mando a distancia de IR