Servo
Una de las aplicaciones más utilizadas de los sistemas de control por ordenador y en la robótica están asociados con los motores, que permiten accionar o mover otros componentes, como puertas, barreras, válvulas, ruedas, etc. Uno de los tipos que vamos a ver en este capítulo son lo servos, hay de dos tipos:
- El servomotor o servos convencionales que posee la capacidad de posicionar su eje en un ángulo determinado entre 0 y 180 grados en función de una determinada señal.
- Servo de rotación continua Son servos por fuera igual que los anteriores, pero pueden girar 360º y se controlan por tiempo
Por defecto cuando se dice servo, es un servomotor o servo convencional
Servomotores o servos convencionales

Los servos son un tipo especial de motor en el que se añade una circuito lógico electrónico que permite un control mucho más preciso que a un motor normal de corriente continua. Esto les permite posicionar el eje en un ángulo determinado.
El hardware interno se compone de un potenciómetro y un circuito integrado que controlan en todo momento los grados que gira el motor. De este modo, en nuestro caso, desde Arduino, usando las salidas digitales PWM podremos controlar fácilmente un servo. Lo ideal es conectarlo a 6V pero trabajan bien en los 5V del Arduino.
Hay muchos modelos, en robótica educativa cuestan entre 1-5€, el más común es el SG90, muy barato, pero tiene muy poca fuerza, el MG90S tiene algo más, si queremos algo más, ya tiene que ser el MG996R pero ya este modelo NO se puede conectar directamente al Arduino o Raspberry, el pico de energía que necesita, provoca el reinicio de la placa. Incluso varios pequeños SG90.
Si quieres saber más, te recomendamos https://www.luisllamas.es/controlar-un-servo-con-arduino/
Ejemplos de uso de servos:
- Curso Arduino con código
- Curso brazo robótico del mClon con nanoArduino
- Apertura de barrera por ultrasonidos en curso Arduino con ArduinoBlocks
- Tractor entrando en el corral Arduino con EchidnaShield
- Apertura de puerta Domótica con Arduino
- Servo con PicoBrick
- Apertura ventana y puerta en Smarth Home para microbit
- Smart Agriculture Kit para micro:bit
Enunciado
Vamos a aprovechar el concepto de mapeo con el siguiente enunciado
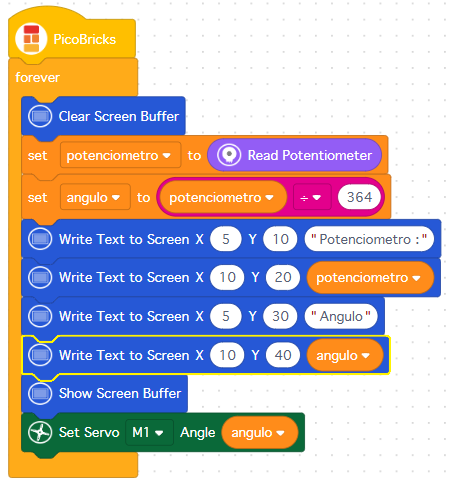
Queremos que se mueva un servo motor (ángulo de 0º a 180º) en función del potenciómetro, conectado a GP27 por lo tanto sus valores van de 0 a 65535 (que es 2 elevado a 16)
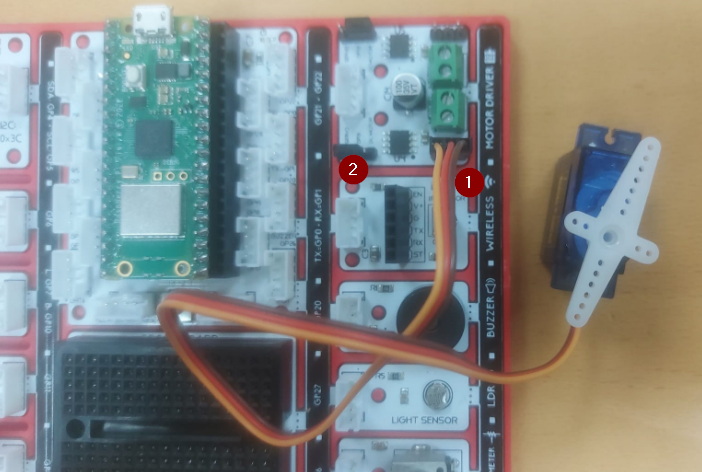
Hardware
- Conectamos un servo en el slot correspondiente
Ojo, fíjate que tienes que conectar el pin - con el marrón. Mira la foto
- Movemos el Jumper a la posición que conecte GP21 con Servo
Mapeo
Utilizaremos la situación G de mapeo https://libros.catedu.es/books/pico-bricks/page/mapeo
por lo tanto dividiremos la posición del potenciómetro por 364
Software
El programa es el siguiente:
No utilizar esta instrucción 
Resultado
Te atreves a... manejar dos servos, por ejemplo con el mando a distancia de IR
No comments to display
No comments to display