Skip to main content
Ejercicio Final: Túnel de lavado con sensores
Programación con Arduino y posterior prototipado de un sistema de lavado automático para coches.

|
COMPONENTES
|
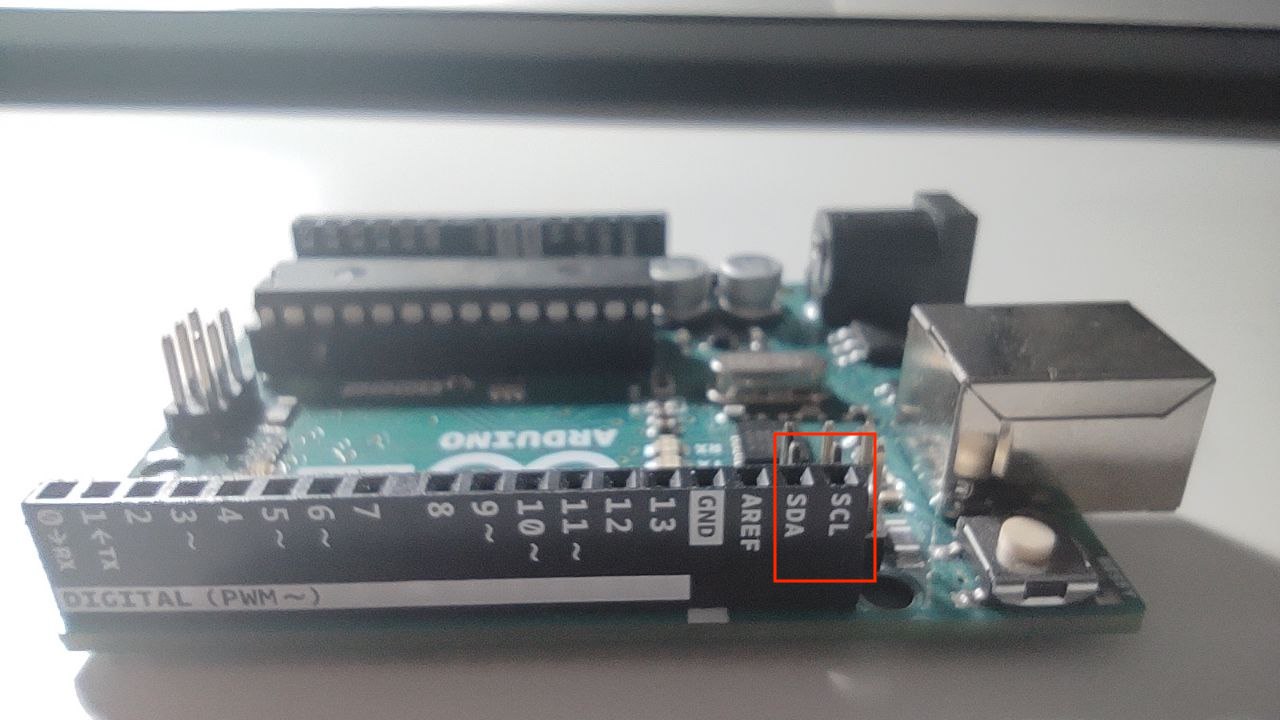
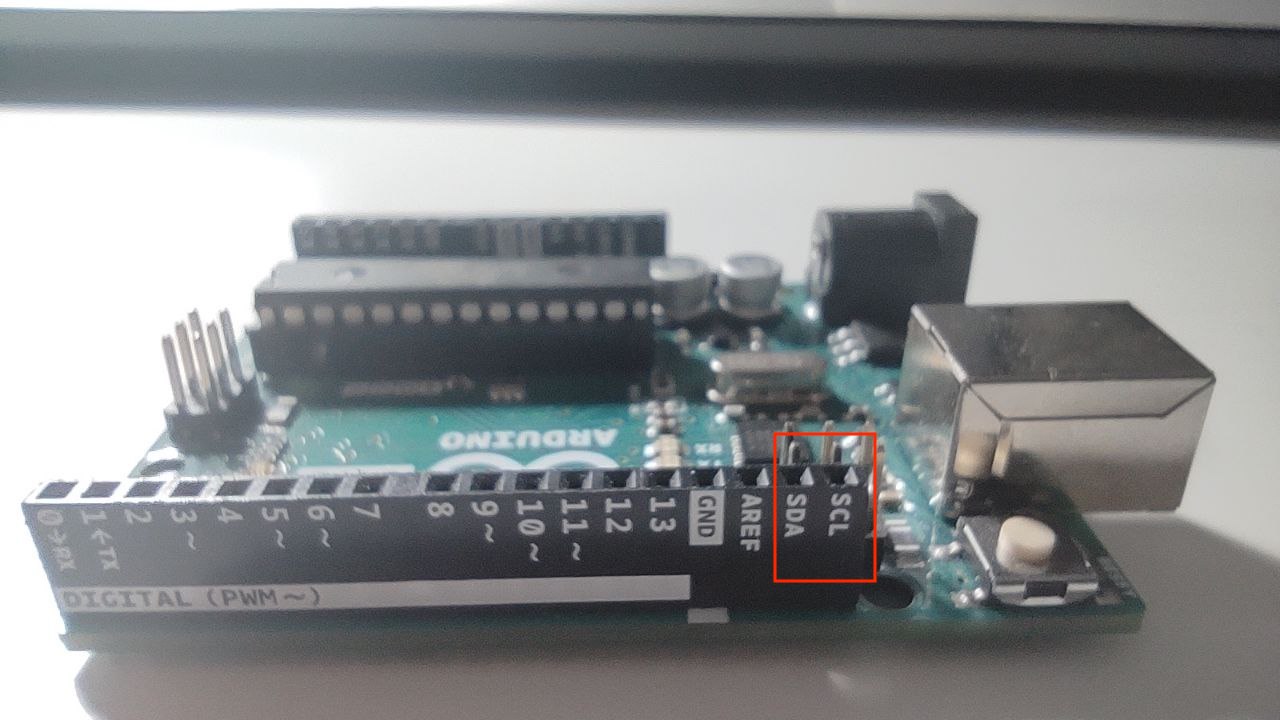
Arduino UNO
|
|
Sensor de Ultrasonidos

|
|
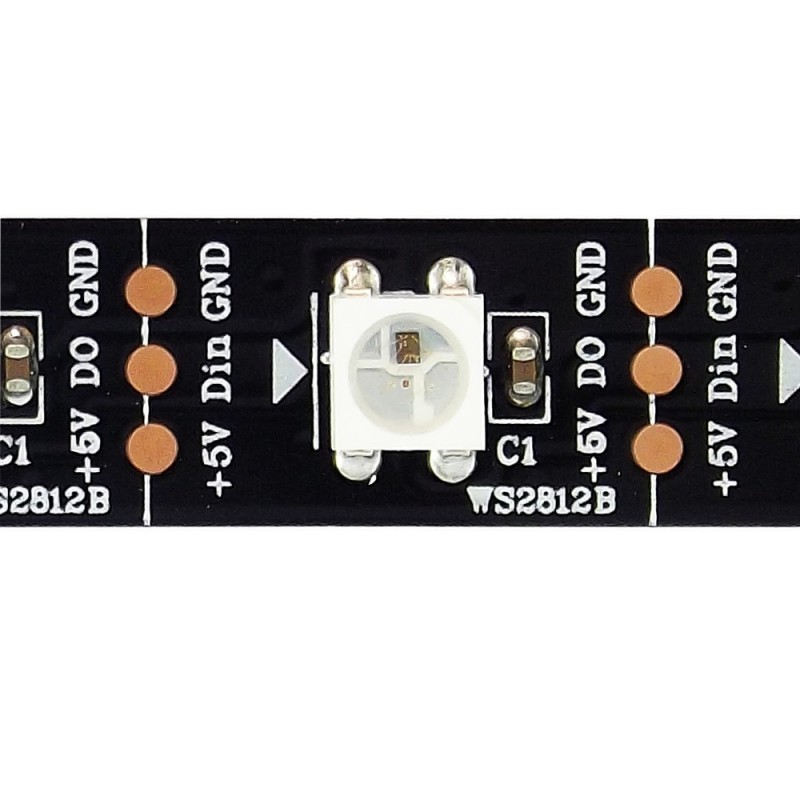
Tira leds NeoPixel
|
|
ServoMotor

|
El acceso al túnel estará regulado por un semáforo (2 leds de la tira Neopixel) que permanecerá en verde hasta que el vehículo se acerque justo a la posición donde debe parar. En este instante el semáforo cambiará a rojo, y comenzará el proceso de lavado.
Durante el tiempo de lavado (6 segundos), el resto de leds de la tira, se irán encendiendo en color azul, uno a uno cada segundo, indicando de este modo el progreso del servicio.
Finalizado el proceso de limpiado y secado, la barrera de salida (un servomotor en posición 0 grados), se abrirá (posición 90 grados) para dejar salir al vehículo, y el semáforo volverá a ponerse en verde.
Al tratarse del ejercicio final, únicamente vamos a ver como accionar un servomotor, ya que se pretende ver como el alumnado ha adquirido los conocimientos, y el resto de componentes han sido ya tratados en las experiencias anteriores.