Si no tienes Vitalinux migasfree pero tienes Linux
Puedes saltarte éste paso preliminar si usas Vitalinux, migasfree lo hará por ti...
En Lego, mbot, cyberpi, ESP32, Arduino... la comunicación con el mismo se hace a través de un dispositivo de interfaz humana (también llamado HID). Por ejemplo en el caso de Lego WeDo con un cable usb y en el caso de Cyberpi con un emisor inhalámbrico (también usb).
Podemos ver los usb conectados con:
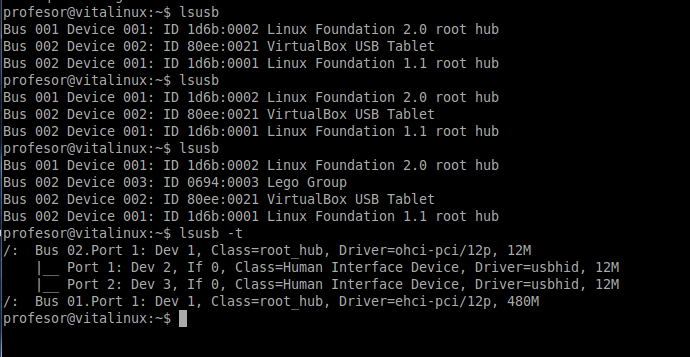
lsusb
En la siguiente captura podemos observar la salida de los comandos indicados antes y después de insertar el cable del robot LEGO. Podemos ver que su IdVendor es 0694 y que su idProduct es 0003.
Para poder leer y escribir en dicho dispositivo (mandar órdenes al robot o leer datos del mismo), Linux crea un archivo de tipo carácter en /dev, pero podemos observar que sólo tiene permisos root: Vemos dos dispositivos, uno el teclado/ratón y otro que corresponde a la conexión con el robot

Para ello, simplemente tenemos que indicarle a udev que nos cree dicho dispositivo con los permisos necesarios:
Editar un archivo nuevo:
sudo nano /lib/udev/rules.d/99-hidraw.rules
Y en ese fichero ponemos la línea
ATTRS{idVendor}=="0694", ATTRS{idProduct}=="0003", SUBSYSTEMS=="usb", ACTION=="add", MODE="0666", GROUP="plugdev"\
Así sucesivamente con los diferentes robots que queramos conectar.
Nota: Muchos robots de placa electrónica, como el ESP32, Cyberpi, Arduino, etc.. en el listado lsub no aparece el nombre como tal, sino el chip de interface CH340 o UART que traduce el protocolo USB al TTL de la placa. La manera de localizar quien es quien es ejecutar lsub antes y después de conectar el robot
Un fichero que contiene todos, y que iremos actualizando sería este para 99-hidraw.rules :
=============================================
# Solucion generica: para todos los dispositivos de interfaz humana\
# KERNEL=="hidraw*", SUBSYSTEM=="hidraw", MODE="0664", GROUP="plugdev"\
# Lego Wedo\
ATTRS{idVendor}=="0694", ATTRS{idProduct}=="0003", SUBSYSTEMS=="usb", ACTION=="add", MODE="0666", GROUP="plugdev"\
# mBot\
ATTRS{idVendor}=="0416", ATTRS{idProduct}=="ffff", SUBSYSTEMS=="usb", ACTION=="add", MODE="0666", GROUP="plugdev"\
# Cyberpi mBot2\
ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="7523", SUBSYSTEMS=="usb", ACTION=="add", MODE="0666", GROUP="plugdev"
# Lego Spike
ATTRS{idVendor}=="0694", ATTRS{idProduct}=="0009", SUBSYSTEMS=="usb", ACTION=="add", MODE="0666", GROUP="plugdev"
# mbot pincho 2.4 UART Windbond
ATTRS{idVendor}=="0416", ATTRS{idProduct}=="ffff", SUBSYSTEMS=="usb", ACTION=="add", MODE="0666", GROUP="plugdev"
# microbit
ATTRS{idVendor}=="0d28", ATTRS{idProduct}=="0204", SUBSYSTEMS=="usb", ACTION=="add", MODE="0666", GROUP="plugdev"
=================================================
Por último quedaría reiniciar el servicio udev
sudo service udev restart
Si antes de realizar el proceso estaba conectado el robot, tendremos que desconectarlo y volverlo a conectar para que los cambios surtan efecto, quedando algo parecido a ésto:

No comments to display
No comments to display