Introducción
- ¿Qué es Smart Agriculture Kit para micro:bit ?
- Conexiones
- Sensores
- Actuadores
- Objetivos y contenidos
¿Qué es Smart Agriculture Kit para micro:bit ?
Es un kit que por menos de 100€ tenemos muchas posibilidades :
- Sensores y actuadores pensados en una domótica en un entorno de agricultura
- Detectores de presencia
- Detectores ambientales de temperatura y humedad
- Detectores de suelo
- Detectores sumergibles de temperatura y nivel de agua
- Actuadores: Servo y luces
- Además de los propios sensores y actuadores de la micro:bit
- Visualización y registro de los datos
- Pantalla OLED
- ESP32 que permite conexión a Internet, por lo tanto visualización de datos utilizando las técnicas más modernas de IoT
- Instrucciones de seguridad

Fuente Robotopia.es
Se suministran los elementos por separado
 Fuente Robotopia.es
Fuente Robotopia.es
Opcionalmente se puede conseguir una maqueta de cartón, para ambientar educativamente todo el conjunto, las instrucciones las tienes aquí (no hagas caso de las conexiones)

Fuente Robotopia.es
Conexiones
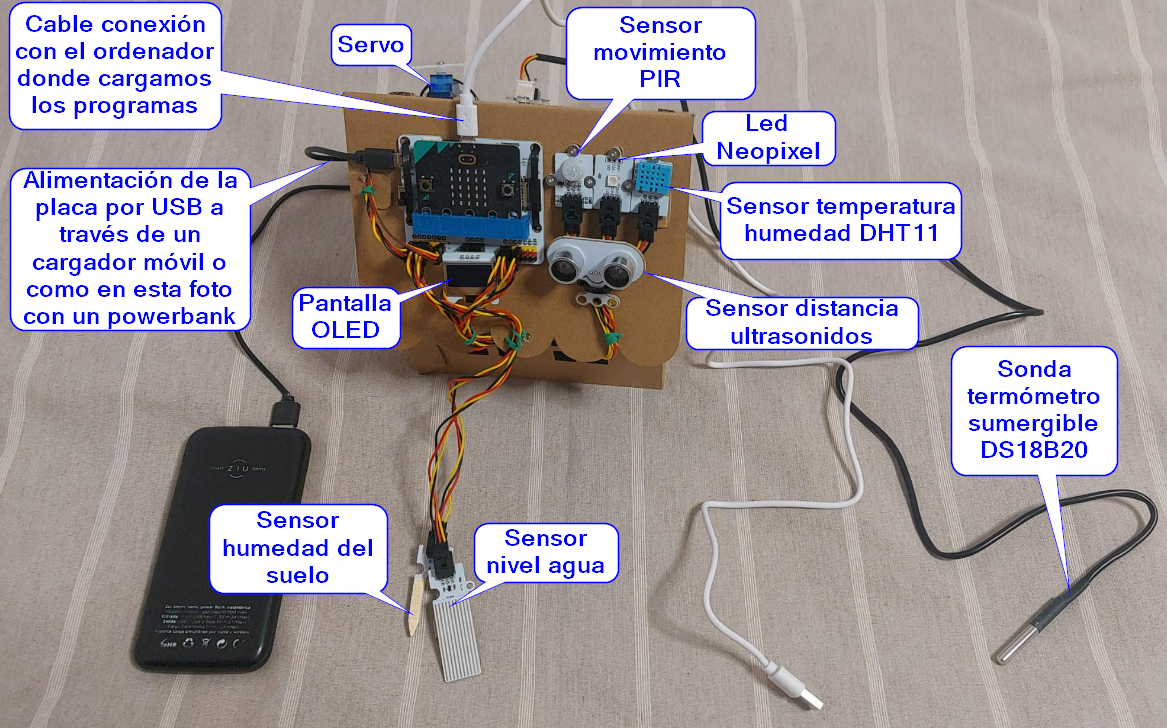
La maqueta es fácil de montar, pero las conexiones requieren destreza. Las conexiones a la placa micro:bit que proponemos son las siguientes:
| Elemento | Conexión | Observación |
| Termómetro sumergible DS18B20 | P1 | Analógico |
| Sensor de nivel de agua | P2 | Analógico |
| Led Neopixel | P14 | Datos |
| Sensor humedad del suelo | P4 | Analógico |
| Servo | P9 | Pulsos digitales |
| Sensor movimiento PIR | P3 | Analógico |
| Sensor distancia ultrasonidos | P13 | Pulsos digitales |
| Sensor DHT11 | P15 | Datos digitales |
El Pin3 es compartido con la matriz de leds con la columna vertical.
Como el sensor PIR es pull up (ver sensores) cuando no detecta es un 1, por lo tanto se enciende la columna vertical de la matriz de leds de la micro:bit cuando no detecta movimiento.
Ojo, el fabricante propone otra configuración que no estamos de acuerdo pues hay que respetar que algunos sensores son analógicos por lo tanto tienen que estar en los pines analógicos de la micro:bit que son P1, P2, P3, P4 y P10.
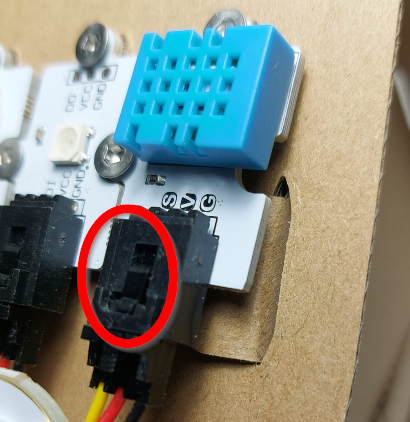
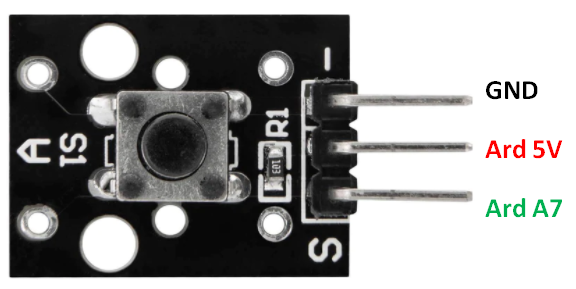
Las conexiones hay que respetar la polaridad:
- El cable negro a masa, también marcado como G Ground
- El rojo el del medio que es la alimentación V Voltios
- El amarillo los datos, también marcado como S salida
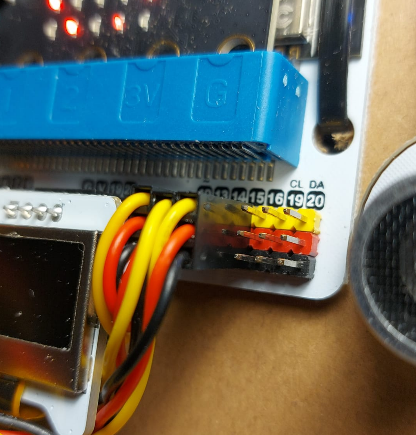
La polaridad también se tiene que respetar en los diferentes elementos, pero es dificil equivocarse pues tiene una pestaña que impide su conexión al revés :
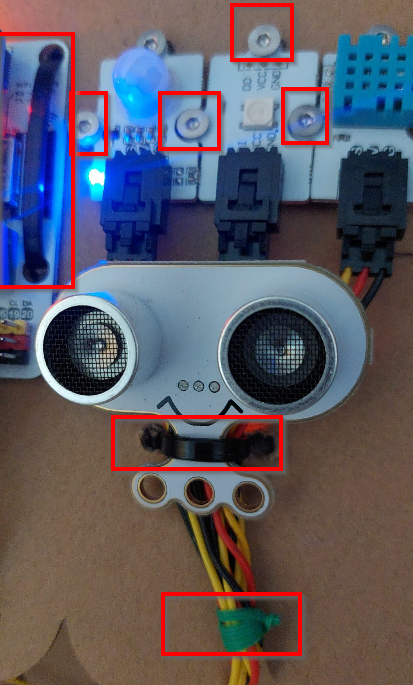
Los diferentes elementos se pueden unir a la maqueta de cartón con bridas, tornillos o alambres forrados:
Sensores
Esta sección es una visión rápida de las posibles entradas de los robots.
NO LEAS TODOS SINO LOS QUE TIENE TU ROBOT
Un poco de teoría...
Cualquier sistema de control podríamos decir que funciona de una manera similar a un ser humano, salvando las distancias. Nosotros recibimos la información del mundo exterior gracias a nuestros sentidos (oído, olfato, gusto, vista y tacto), nuestro cerebro procesa esa información y a través de nuestros músculos o de nuestra voz realizamos diferentes acciones. Pues lo mismo sucede con los sistemas de control, reciben información del exterior gracias a los diferentes SENSORES, procesan esa información en sus PLACAS CONTROLADORAS (sus cerebros) tales como Arduino y dan una respuesta utilizando sus diferentes ACTUADORES.
Un sensor es un objeto capaz de detectar magnitudes físicas o químicas y transformarlas en variables eléctricas. Los sensores o periféricos de entrada nos permiten obtener información del mundo real para utilizarla desde el programa de Arduino.
En la actualidad la cantidad de sensores disponibles es tan extensa como las variables que queramos medir, desde sensores de temperatura, humedad, luminosidad,... hasta acelerómetros, giroscopios, GPS,... pasando por detectores de gases, de pulsos cardiacos, sensores de efecto HALL,...
Tipos de sensores
- DIGITAL: un sensor digital sólo tiene dos estados: activado/desactivado, ON/OFF, 1/0, Alto/Bajo, ... En este caso conectaremos el sensor a una de las entradas digitales de Arduino para leer el estado.
Ejemplo: un pulsador es un tipo de sensor sencillo que sólo nos da dos estados, “pulsado o no pulsado”. Conectado a la placa Arduino debe generar 0v en reposo y 5v al pulsarlo. De esta forma desde el programa de Arduino podremos leer el estado del botón.

- ANALÓGICO: el sensor nos puede dar un rango de valores, normalmente se traduce en un valor de tensión o de corriente variable en función de la señal captada al sensor. En este caso conectaremos el sensor a una de las entradas analógicas de Arduino (A0,..., A5). El rango de entrada será una tensión entre 0v (GND) y 5v.
Ejemplo: Una fotorresistencia es un componente electrónico cuya resistencia disminuye con el aumento de intensidad de luz incidente. Su valor varía entre 0 y 5 v. la cantidad de valores que pueden leer las entradas analógicas de Ardunio son de 10 bits es decir 1024 valores. De tal modo que 0 = 0 v. y 1023 = 5V.

- DATOS: el sensor ofrece su información a través de una interfaz de comunicación. La forma de comunicación puede ser por sistemas estándar como I2C o SPI o algunos sensores usan su propio protocolo para codificar la información y debemos realizar desde el software la decodificación correcta para interpretar los datos del sensor (normalmente los desarrolladores de este tipo de sensores ofrecen una librería software para Arduino que hace todo el trabajo).
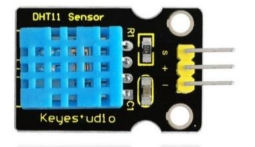
Ejemplo: el sensor DHT11. Por un solo pin envía los datos de temperatura y humedad.
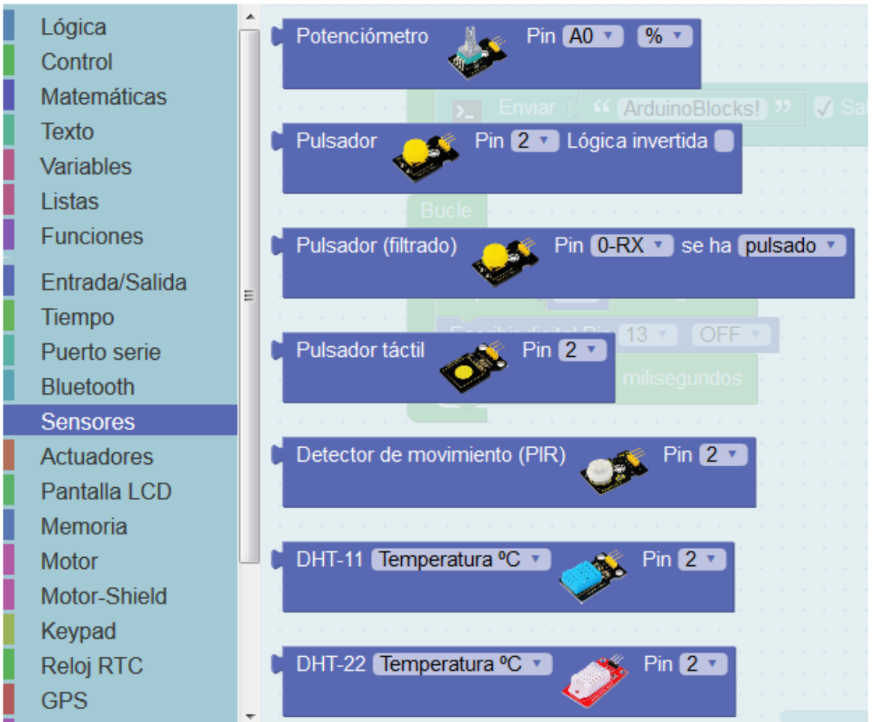
Sensores modulares.
En la actualidad existen infinidad de sensores que los fabricantes presentan en forma modular. Esto hace que su conexión y utilización sea mucho más sencilla que la tradicional, olvidándonos de resistencias, polaridades, cableados,… para su correcto funcionamiento.
Sensor pulsador
Es un sensor digital, que presenta dos estados; cuando se presiona el botón, emite una señal de bajo (0V), cuando suelta el botón, emite una señal de bajo alto (5V). Datasheet
Un ejemplo de uso

Otra manera más "barata" de sustituir este módulo pulsador es poner un pulsador normal y una resistencia (±10k), al pulsar se produce una entrada en el Arduino, hay dos configuraciones, que al pulsar se emita un 0 lógico (configuración Pull up) o que al pulsar emita un 1 lógico (configuración Pull down) ¿Por qué hay que poner una resistencia?
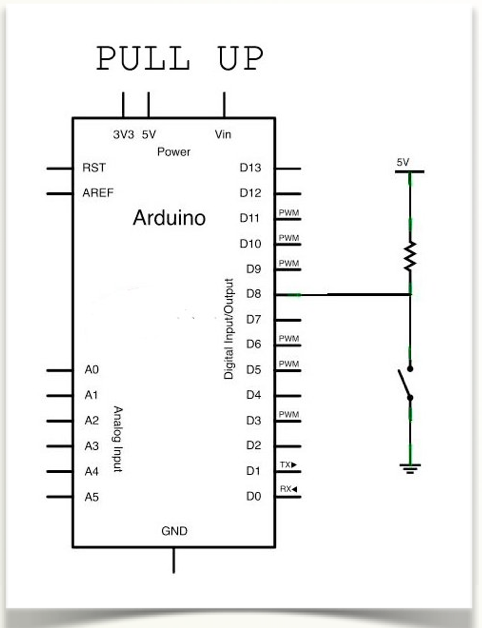
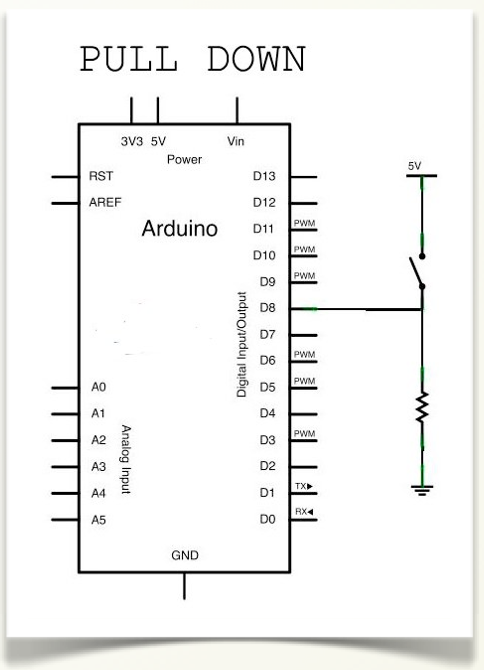
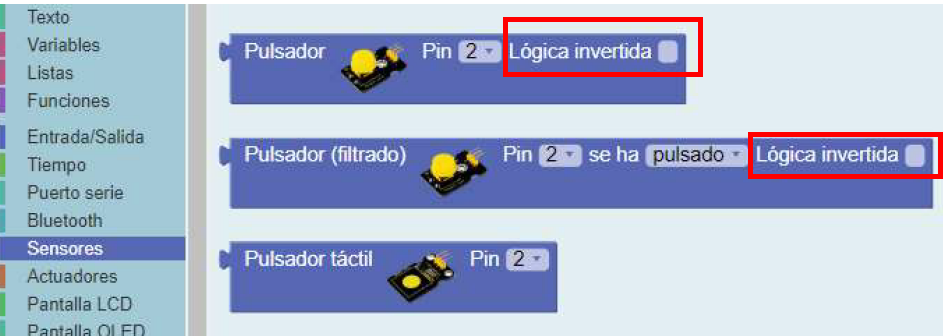
Lo "normal" es que al pulsar se emita un '1' configuración Pull down, pero hay pulsadores que funcionan Pull up y los llaman lógica invertida, por eso en la programación por bloques podemos encontrar esto:
Sensor Táctil Capacitivo.
Este pequeño sensor puede "sentir" a las personas y el tacto y la retroalimentación de metales a un nivel de voltaje alto / bajo. Incluso aislado por alguna tela y papel, todavía puede sentir el tacto. Su sensibilidad disminuye a medida que la
capa de aislamiento se hace más gruesa. En nuestra opinión lo preferimos frente al Sensor pulsador pues es muy económico, duradero y fiable.
Un ejemplo de uso en

Potenciómetro y joystick
Un potenciómetro es una resistencia variable, es decir, cambia de valor mecánicamente, lo tenemos en multitud de dispositivos. El joystick es internamente dos potenciómetros con un pulsador integrado en un solo mando.
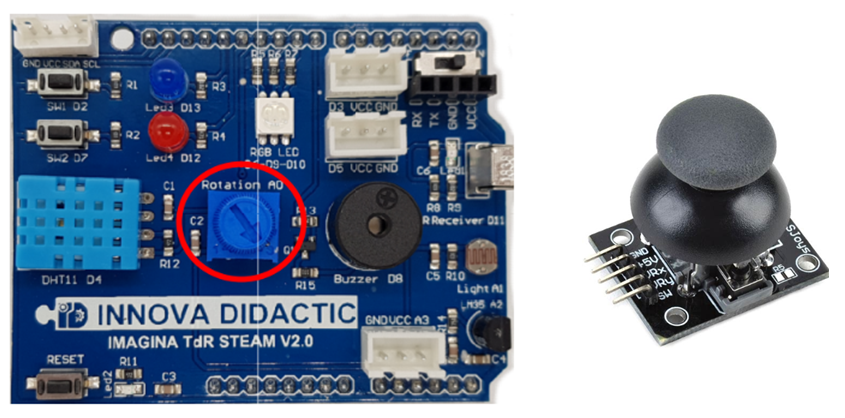
Este sensor es analógico, su salida puede ser cualquier valor entre Vcc y GND (si está en divisor de tensión como en la placa Edubásica no llega a esos valores extremos), por lo tanto hay que conectarlo a una entrada analógica de Arduino y como cualquier entrada analógica, proporcionará valores entre 0 y 1023.
Ejemplos de uso:
- Arduino con código: Mapeo del potenciómetro
- Arduino con código: Regular la luz con potenciómetro
- Arduinoblocks en el aula
- En Arduino con Echidna, con joystick
- Domótica con Arduino con joystick
Sensor Fotocélula LDR.
El uso de fotocélulas es muy común en nuestras vidas, las encontramos en el encendido automático de farolas, apertura de puertas,… La fotocélula es un semiconductor. Es ampliamente utilizado en campos de interruptores de control automático como cámaras, luces solares de jardín, lámparas de césped, detectores de dinero, relojes de cuarzo, tazas de música, cajas de regalo, mini luces nocturnas, interruptores de control de luz y sonido, etc.
Es un sensor analógico dando valores entre 0 y 5V y como entrada analógica de un Arduino se traduce en un rango de 0 a 1023 valores.
Un ejemplos de uso :
- el interruptor crepuscular del curso Arduino con ArduinoBlocks
- Medir la luz en Rover con Arduino
- Medir la oscuridad en Arduino con mBlock
- Hinchar un balón en Arduino con mBlock
Una manera más económica de montar este sensor es utilizar una resistencia y un LDR:
- El LDR cuando más oscuridad, más resistencia
- En una configuración PULL DOWN, cuanto más luz, la resistencia del LDR baja, por lo tanto más tensión en A6
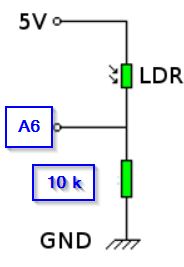

Los módulos LDR que se venden suelen esta configuración Pull down, es decir, cuanto más luz, más tensión:

La instrucción con Arduinoblocks ya cuenta con esta configuración Pull downUp de que cuando más luz, más valor tiene la entrada analógica.

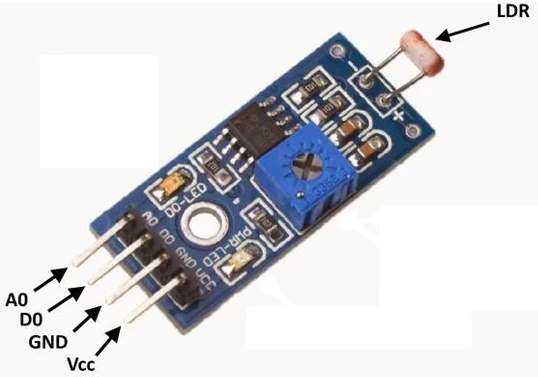
Hay módulos LDR ya montados, que tienen componentes activos es decir, llevan circuitos electrónicos, transistores que amplifican etc... y dan la salida digital con un potenciómetro para definir el rango de luz que cambia de estado lógico. Puedes ver en la figura que tiene una salida digital D0.

O hay algunos que tienen 4 pines como en la figura que ofrecen las dos cosas: salida analógica A0 y digital D0.
Nosotros aconsejamos el divisor de tensión por tres razones: más barato, no implica gran circuitería y es visible su funcionamiento frente a estos encapsulados.
Sensor de Ultrasonidos.
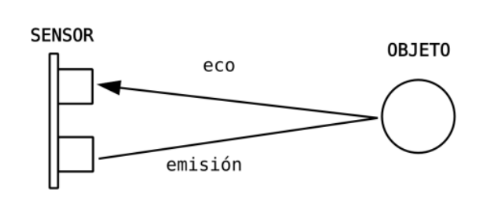
Es un sensor digital de distancias por ultrasonidos capaz de detectar objetos y calcular la distancia a la que se encuentra en un rango de 2 a 350 cm. Su uso es tan sencillo como enviar el pulso de arranque y medir la anchura del pulso de retorno.
No es un sensor preciso, con una ligera inclinación de la superficie ya da lecturas erróneas pero es muy barato
El más común es el HC-SR04 que tiene 4 pines de conexión: VCC Trig (Disparo del ultrasonido) Echo (Recepción del ultrasonido) y GND aunque en algunos modelos como el de Elecfreaks tiene 3 pines. Integra Trig y Echo en uno sólo.
La distancia se calcula con esta fórmula:
Distancia en cm = {(Tiempo en segundos entre Trig y el Echo) * (V.Sonido 34000 en cm/s)} / 2
Si programas en código, tienes que utilizar la fórmula anterior, previamente tienes que programar el cálculo del tiempo entre una emisión de un pulso en Trg y la respuesta en Echo.
Si utilizas la programación en bloques, no es necesario, seguro que hay un bloque que lo hace todo por ti 😍
Ejemplos de uso:
- Alarma en Domótica con Arduino
- Piano invisible en Arduino con ArduinoBlocks,
- Sensor parking en Arduino con ArduinoBlocks
- Piano invisible en Arduino con mBlock
- Sensor parking en Arduino con mBlock
- Sensor de distancia de ultrasonidos con Picobricks
Sensor DHT11 (Temperatura y Humedad).
Este sensor de temperatura y humedad DHT11 nos permite determinar las zonas de confort para un rango de temperaturas entre 0ºC y 50ºC con un error de ± 2ºC y un rango de humedad entre 20 y 90 % ± 5% . Una salida digital para dos variables cómo lo hace? Tiene dentro un pequeño microprocesador que lanza por el bit de datos 40 bits en serie, los 16 primeros son la humedad (en BCD) y los 16 restantes es la temperatura (en BCD) los 8 restantes son de comprobación Checksum (en binario) como la letra del DNI. Por ejemplo 0100 0111 0000 0011 0001 1001 0000 0000 0001 1000 es 0100 0111 0000 0011 = 47.03% de humedad y 0001 1001 0000 0000 = 19.00ºC y la comprobación es la suma de 4+7+0+3+1+9+0+0=24=11000
Ejemplos de uso:
- Medir H y T con Blink en Rover con Arduino
- Estación meteorológica Arduino con Arduinoblocks
- Arduinoblocks en el aula
- SMART HOME con Micro:bit
No es un sensor con gran sensibilidad, pero para propósitos educativos cumple sus funciones. Por dentro tiene una resistencia NTC que decrementa su resistencia si aumenta la temperatura. Hay otros que van al revés, los PTC. Tanto los NTC como los PTC se llaman thermistores. Para la humedad, mide la capacidad de un condensador que es sensible a la humedad, o sea, un sensor capacitivo.
Tenemos dos opciones comerciales: Encapsulado que lo tienes preparado para conectar la alimentación y leer por el pin de datos, o sin encapsular, que hay que colocar una resistencia de aproximadamente 10k entre Vcc y Data
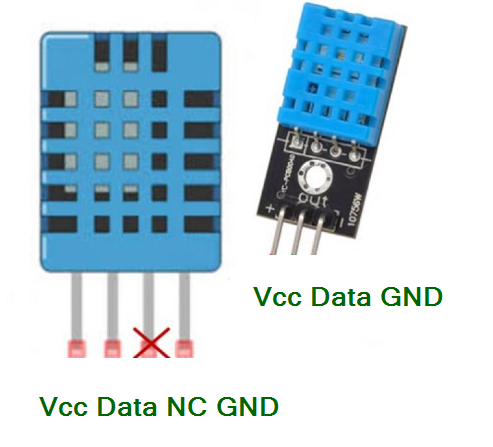
Ejemplo de uso de un DHT11 sin encapsular:

Fuente Luis LLamas CC-BY-NC-SA https://www.luisllamas.es/arduino-dht11-dht22/
Si queremos mejorar la sensibilidad, podemos utilizar el DHT22 que es igual pero de color blanco y más caro. Si lo que queremos es sólo la temperatura es mejor utilizar el LM35D que tiene un rango de temperaturas desde 0ºC a 100ºC con una sensibilidad de 2mV/ºC

Es un sensor bastante mediocre, si necesitas una precisión el doble, te recomendamos el DHT22 que funciona exáctamente igual pero es de color blanco y más caro ⁓3€. Ver https://www.luisllamas.es/arduino-dht11-dht22/
Sensor IR
Es un sensor para distancias cortas hasta 2cm y no da la distancia, simplemente si hay o no hay obstáculo, pero son muy baratos, unos 0.30€. Aquí tienes un ejemplo de evita obstáculos en un rover marciano con Raspberry Para saber más te recomendamos esta página de Luis Llamas
IR Sensor Module for Arduino Projects | 3D Model by Veer AI on Sketchfab
Sensor llama
Este sensor de llama se puede utilizar para detectar fuego u otras luces cuya longitud de onda se encuentra entre 760 nm ~ 1100nm.
Un ejemplo de su uso:


Sensor de Gas (MQ2).
Detecta gases inflamables : GLP, I-butano, propano, metano, alcohol, hidrógeno, humo... con más sensibilidad en algunos que en otros. Siempre detecta el conjunto. Son usados en electrónica de consumo y mercados industriales.
- Sensibilidad Tiene alta sensibilidad y se puede ajustar girando el potenciómetro.
- Tiempo de respuesta: Internamente posee un calentador para aumentar su temperatura y que estos gases reaccionen con la resistencia interna que tiene, por lo tanto tardan algo en responder la primera vez que se conectan, incluso horas en algunos modelos. Una vez calentados son rápidos en la respuesta.
- Tipo de salida: Analógico pero si tiene 4 pines como el de la figura, incorpora un pin digital.
- Ejemplos de uso:

Sensor de humedad de suelo.
Un higrómetro de suelo FC-28 es un sensor que mide la humedad del suelo. Son ampliamente empleados en sistemas automáticos de riego para detectar cuando es necesario activar el sistema de bombeo. El FC-28 es un sensor sencillo que mide la humedad del suelo por la variación de su conductividad. No tiene la precisión suficiente para realizar una medición absoluta de la humedad del suelo, pero tampoco es necesario para controlar un sistema de riego. Los valores obtenidos van desde 0 sumergido en agua, a 1023 en el aire (o en un suelo muy seco). Un suelo ligeramente húmero daría valores típicos de 600-700. Un suelo seco tendrá valores de 800-1023.
Luis Llamas CC-NC-BY-SA https://www.luisllamas.es/arduino-humedad-suelo-fc-28/
Se puede utilizar este sensor para hacer un dispositivo de riego automático, puede detectar si las plantas “tienen sed” y evitar que se marchiten.
La corriente de trabajo del sensor es menor de 20mA. El voltaje de salida es de 0V (en el aire) a 2,3V (totalmente sumergido en agua).

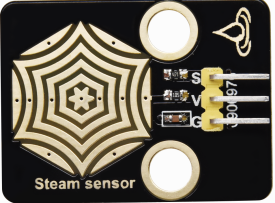
Sensor de humedad.
Este sensor analógico está diseñado para identificar y detectar la presencia de agua y su cantidad. Puede servir para detectar el nivel de agua, para disparar una alarma en caso de una fuga de agua, también para hacer un limpiapalabrisas automático.... puedes ver un ejemplo de uso en :
Mide el volumen de agua caída a través de una serie de rastros de cables paralelos expuestos.

Sensor de efecto Hall.
Este es un sensor de inducción magnética. Detecta los materiales magnéticos dentro de un rango de detección de hasta 3 cm. El rango de detección y la fuerza del campo magnético son proporcionales. La salida es digital.


Sensor Hall. Edwin Helber Hall De Desconocido - Popular Science Monthly Volume 64, Dominio público
Edwin Helbert Hall descubrió en 1879 que en presencia de un campo magnético, un conductor que conduzca una corriente se le producía un campo eléctrico porque las cargas eléctricas se desviaban de su trayectoria principal, nuestro sensor simplemente mide ese campo eléctrico:

De Luis Llamas CC-BY-NC
El sensor tiene un led de color rojo que indica que hay una lectura de campo magnético. Un ejemplo de uso lo puedes ver aquí: medir rocas magnéticas con el Rover con Arduino
Sensor inclinación
Este sensor funciona al hacerle vibrar, emitiendo una señal digital de todo o nada. El módulo del sensor viene provisto de un potenciómetro para poder regularlo.

Sensor de golpe
Es un sensor digital que al ser golpeado este sensor envía una señal momentánea.
Sensor de pulso cardíaco.
Este módulo utiliza un LED infrarrojo (IR) ultrabrillante y un fototransistor para detectar el pulso en el dedo. Principio de funcionamiento: Se debe colocar el dedo entre el LED infrarrojo ultrabrillante (parte superior) mientras que el fototransistor, que queda en el otro lado, recoge la cantidad de luz transmitida. La resistencia del fototransistor variará levemente a medida que la sangre pase a través de su dedo.

Sensor de Alcohol.
Este sensor de gas analógico MQ-3 es adecuado para detectar alcohol. Se puede usar en un analizador de aliento. También tiene una alta sensibilidad al alcohol y baja sensibilidad a la bencina (éter de petróleo). La sensibilidad se puede ajustar con el potenciómetro.

Sensor de CO2
Hay sensores que utilizan el protocolo I2C, este protocolo permite conexiones serie y pueden compartir el mismo cable pues cada elemento tiene una dirección diferente. Esto lo veremos en el Display LCD. Se identifican por los pinen SDA y SCL

Resistencia Flex
Es una resistencia que cuanto más se dobla más resistencia ofrece, desde 25k hasta 125k

Para utilizar esta resistencia haremos un DIVISOR DE TENSIÓN que consistirá en poner dos resistencias en serie y repartirá la tensión total entre 0V y 5V en las dos resistencias, el punto medio será un punto que tendrá una tensión variable en función de las dos resistencias, como la es variable, esa tensión es variable y ya tenemos la entrada analógica:

Es decir:
- La resistencia entre masa GND del ARDUINO (cable negro) y un punto en la placa protoboard
- ese punto medio conectarlo a una entrada analógica, por ejemplo A0 (cable amarillo)
- Una resistencia de valor parecida a la Flex de decenas de K entre ese punto y +5V (cable rojo en la foto)

Este sensor tiene posibilidades para usarlo en "ropa inteligente".
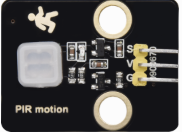
Sensor de movimiento
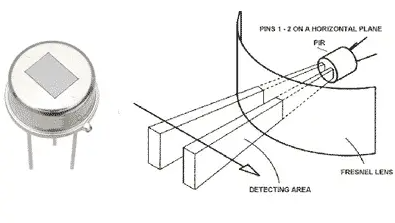
Los sensores infrarrojos pasivos (PIR) son dispositivos para la detección de movimiento. Son baratos, pequeños, de baja potencia, y fáciles de usar. Por esta razón son frecuentemente usados en juguetes, aplicaciones domóticas o sistemas de seguridad.
Los sensores PIR se basan en la medición de la radiación infrarroja. Todos los cuerpos (vivos o no) emiten una cierta cantidad de energía infrarroja, mayor cuanto mayor es su temperatura. Los dispositivos PIR disponen de un sensor piro eléctrico capaz de captar esta radiación y convertirla en una señal eléctrica.
En realidad cada sensor está dividido en dos campos y se dispone de un circuito eléctrico que compensa ambas mediciones. Si ambos campos reciben la misma cantidad de infrarrojos la señal eléctrica resultante es nula. Por el contrario, si los dos campos realizan una medición diferente, se genera una señal eléctrica.
De esta forma, si un objeto atraviesa uno de los campos se genera una señal eléctrica diferencial, que es captada por el sensor, y se emite una señal digital.
El otro elemento restante para que todo funcione es la óptica del sensor. Básicamente es una cúpula de plástico formada por lentes de fresnel, que divide el espacio en zonas, y enfoca la radiación infrarroja a cada uno de los campos del PIR.
De esta manera, cada uno de los sensores capta un promedio de la radiación infrarroja del entorno. Cuando un objeto entra en el rango del sensor, alguna de las zonas marcadas por la óptica recibirá una cantidad distinta de radiación, que será captado por uno de los campos del sensor PIR, disparando la alarma.
Luis Llamas CC-BY-NC-SA https://www.luisllamas.es/detector-de-movimiento-con-arduino-y-sensor-pir/

Puedes ver ejemplos de uso en robótica en :

Más sensibles son los sensores de microondas. Son un radar que por efecto Doppler pueden captar cualquier objeto en movimiento dentro de un alcance de 5-7 metros en cualquier dirección e independiente de su temperatura. Es un buen sensor para alarmas, activación de luz por presencia..... Para saber más ver la página de Luis Llamas

Su conexión es muy sencilla, es un detector digital que hay que alimentarlo como el resto de sensores.

Curiosamente, la gran ventaja técnica de los de microondas es un gran inconveniente para usarlo en el aula, con cualquier movimiento se dispara, luego para clase es mejor el sensor PIR
Esta página esta adaptada de este enlace. José Andrés Echevarría @cantabRobots CC-BY-NC-SA.
Actuadores
Esta página es un repaso rápido de las posibles salidas de los robots
NO LEAS TODOS SÓLO LOS QUE TIENE TU ROBOT
¿Qué es un actuador?
Un actuador es el nombre genérico que empleamos para cualquier dispositivo capaz de realizar acciones en el mundo físico y que podremos controlar desde un autómata o procesador como Arduino. En particular, usamos el nombre actuador para los dispositivos que son capaces de generar movimiento. Luis LLamas CC-BY-NC-SA
ACTUADORES
Motores baja potencia
Con el Arduino podemos usar motores de corriente continua de juguete como en la figura, aptos para poner un ventilador. Ejemplo de uso Smart Home para microbit

Motores con algo de potencia
Si quieres usar un motor para mover unas ruedas, ya pide más corriente, no se puede conectar directamente al la placa (Arduino, esp32 etc..). El de la figura es típico en robótica y lleva reductores dentro para bajar la velocidad :

Necesita una alimentación extra, como el LM298N y las pilas., o el B6612FNG o una shield específica.

CC-BY-NC Luis Llamas
Ejemplos de uso lo puedes ver en
- Curso mClon con nanoArduino con el B6612FNG
- Curso Rover con Arduino con la shield L293D ESP-12E para el NODE MCU que internamente tiene el LM298N
- Curso Arduino con código con LM298N y también con un transistor
Los motores pueden (y deben) de estar conectados a salidas PWM de tal manera que se pueda regular la potencia y por lo tanto la velocidad.
Servos
Un servo convencional es un motor donde fijamos el ángulo desde 0º a 180º, pero si queremos una rotación, existen servos rotatorios que simplemente tienen su velocidad de rotación controlada
Ejemplos de uso de servos:
- Curso Arduino con código
- Curso brazo robótico del mClon con nanoArduino
- Apertura de barrera por ultrasonidos en curso Arduino con ArduinoBlocks
- Tractor entrando en el corral Arduino con EchidnaShield
- Apertura de puerta Domótica con Arduino
- Servo con PicoBrick
- Apertura ventana y puerta en Smarth Home para microbit
- Smart Agriculture Kit para micro:bit
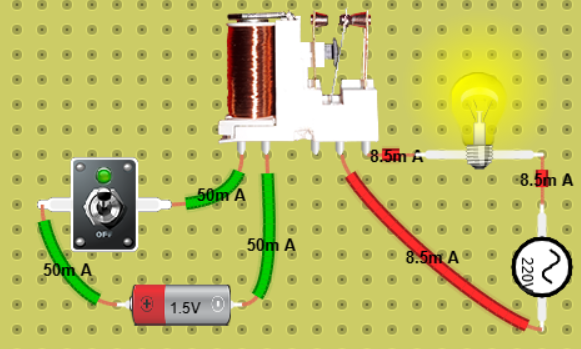
Relés
Un relé es un interruptor activado por un electroimán, lo que permite independizar los circuitos. En el dibujo se ve que el circuito rojo de 220V esta separado del verde, de sólo 1.5V. Pero es el circuito verde que al funcionar, hace que el electroimán mueva el interruptor del relé y encienda la bombilla. El objetivo es que he podido encender una bombilla de 220V sin tocar los 220V peligrosos. En el circuito verde, el interruptor puede ser un Arduino. Experiméntalo en este simulador.
- Un ejemplo con Arduino en Luis LLamas
- Un ejemplo de uso en Picobricks
Electroimán
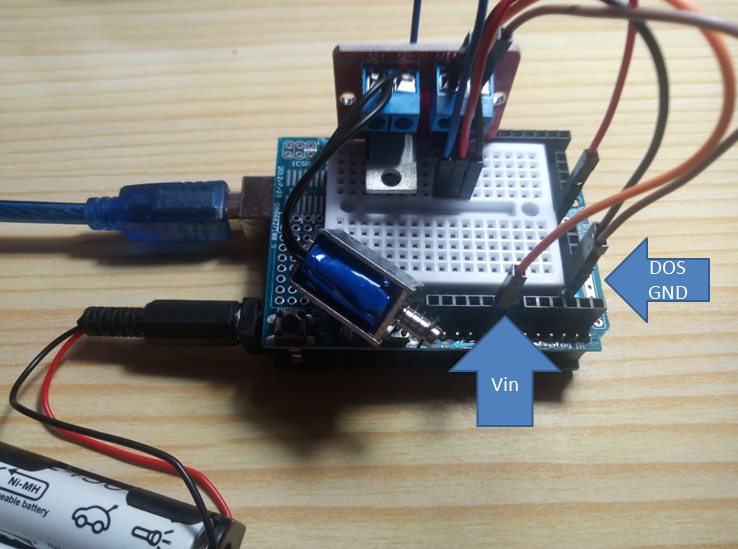
El electroimán no se puede conectar directamente, utilizaremos una etapa de potencia, por ejemplo el transistor el IRF520N que amplifique la señal del Arduino, pues las salidas de Arduino no tienen potencia para mover el electroimán. Para dar esa potencia utilizaremos otra fuente externa, unas pilas:
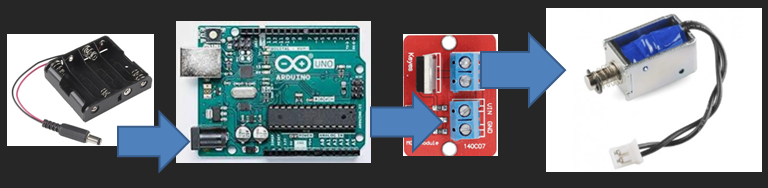
Las conexiones son :
- SIG del IRF520N a una salida digital por ejemplo D13
- VCC del IRF5020N al 5V del ARDUINO
- Los dos GND del IRF520N a GND del ARDUINO
- V+ y V- del IRF5020N al solenoide, da igual qué cable pues no tiene polaridad.
- VIN del IRF520N al VIN del ARDUINO (son los voltios de la pilas)
Motor paso a paso
Igual que el electroimán, necesitamos un controlador que nos de la potencia necesaria para mover el motor, el ULN2003

Imagen BY-NC-SA de Luis Llamas
También igual que el electroimán, necesitamos una potencia extra con las pilas:

Conexión :
- Cuatro pines digitales del ARDUINO al IN1,IN2,IN3,IN4 del ULN2003 por ejemplo D10,D11,D12,D13
- El conector blanco del ULN2003 al motor paso a paso
- El (+) del ULN2003 al Vin del ARDUINO
- El (-) del ULN2003 al GND del ARDUINO

La configuración más sencilla es la rotación simple en sentido horario (llamada fase1) :

Imagen BY-NC-SA de Luis Llamas
Es decir:
| Paso | IN1=D10 | IN2=D11 | IN3=D12 | IN4=D13 |
|---|---|---|---|---|
| Paso 1 | ON | OFF | OFF | OFF |
| Paso 2 | OFF | ON | OFF | OFF |
| Paso 3 | OFF | OFF | ON | OFF |
| Paso 4 | OFF | OFF | OFF | ON |
Si has entendido este ejemplo serás capaz de realizar las configuraciones que desees.
OTRAS SALIDAS
No son actuadores pues no representan movimiento pero son también salidas del Arduino como los actuadores, luego lo vemos en esta página
Buzzer activo
Reproduce un tono de una frecuencia determinada por el fabricante cuando recibe un '1' digital. Su conexión es muy simple:
- GND a GND y VCC a 5V (ojo que están a los dos extremos, marcados en rojo y en negro)
- OUT o también señalado como I/O a un pin digital, por ejemplo D13

Ejemplos de uso:
- Domótica con Arduino: Apertura puerta con mBlock
- Domótica con Arduino Apertura puerta con código
Buzzer pasivo
La diferencia de un buzzer activo con el pasivo es que el pasivo hay que mandar la onda que se tiene que reproducir, como Arduino no puede reproducir onda puras (senoidales analógicas), se le envía ondas cuadradas con la frecuencia que se pretende reproducir. Como se puede ver en la figura, no tiene elementos auxiliares para reproducir un tono, es simplemente un altavoz.

Ejemplos de uso
LEDS Y OTROS ELEMENTOS VISUALIZADORES
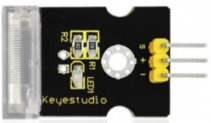
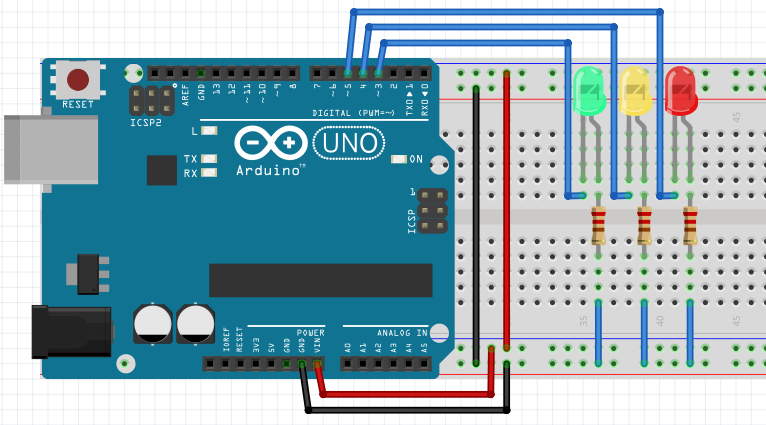
Led normal
Un diodo es la unión de dos semiconductores P-N que sólo permite la corriente en un sentido. Un diodo LED es un diodo, que al pasar esta corriente emite una luz. Hay de 3mm y de 5mm de grosor, transparentes, traslúcidos y de colores (realmente son traslúcidos tintados)
Tenemos pues que respetar su polaridad para que funcione:
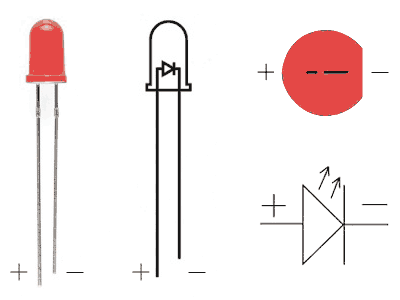
Fuente Luis LLamas CC-BY-NC Encender LED con Arduino
Si alimentamos el LED con una tensión inferior a su tensión de polarización directa Vd ±1,4V-3,8V el led no luce. si alimentamos con una tensión superior, la corriente que circula se dispara por lo que se rompe. Conclusión: Hay que poner una resistencia limitante. Para calcularla te recomiendo la página de Luis Llamas Encender LED con Arduino
Aquí puedes ver un ejemplo de semáforo en el curso Arduino con código

Se puede conectar directamente pues las salidas de Arduino tienen una limitación interna de 20mA como en este ejemplo https://www.youtube.com/watch?v=EFFSLvIF9rY
Los LEDS igual que los motores pueden se encendidos o todo o nada con salidas digitales 0 y 1 o salidas PWM de esta manera conseguimos luminosidades medias, en esta práctica con el potenciómetro se regula la intensidad de la luz de un LED
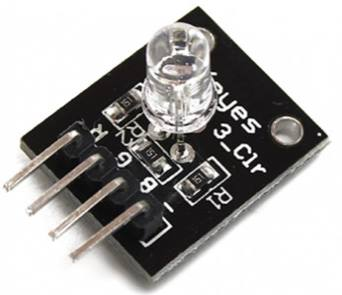
Led RGB
Se trata de un encapsulado que integra 3 leds de los tres colores básicos. Cada color básico se puede regular desde 0 a 255 de intensidad, luego tenemos 16 millones de tonalidades diferentes.
Un ejemplo de su uso lo puedes ver en
Existen LEDS RGB que se comunican unos a otros, (ver este ejemplo en el curso mClon) como las tiras de leds RGB que cambian de color todos simultáneamente.
Neopixel
La cinta LED RGB se basa en el chip controlador WS2812B de Neopixel con el cual podemos tener el control de cada pixel y de cada color, ya sea rojo, verde y azul a través de un solo cable de datos.
Los WS2811, WS2812 y WS2812B son LED que disponen de lógica integrada, por lo que es posible variar el color de cada LED de forma individual (a diferencia de las tiras RGB convencionales en las que todos los LED cambian de color de forma simultánea). Están basados en el LED 5050, llamado así porque tiene un tamaño de 5.0 x 5.0 mm.
Es un LED de bajo consumo y alto brillo, que incorpora en un único encapsulado los 3 colores RGB. La genial novedad del WS2812B (y resto de familia) es añadir un integrado dentro de cada LED, que permite acceder a cada pixel de forma individual. Por este motivo este tipo de LED se denominan “individual addressable”. Esto abre la puerta a un sinfín de aplicaciones y combinaciones, que van desde dotar de iluminaciones distintas zonas con una única tira, animaciones complejas, o incluso generar pantallas enteras de alta luminosidad....
A los LED WS2812B también se les denomina NeoPixel
Luis Llamas CC-BY-NS-SA https://www.luisllamas.es/arduino-led-rgb-ws2812b/

- Smart Home para Microbit con 4 leds RGB Neopixel
- Smart Home para ESP32
- Smart Agriculture Kit micro:bit
Láser
El diodo láser es un elemento motivador, barato y fácil de usar con el Arduino pues se activa digitalmente, si enviamos un 1 emite un rayo láser. Un ejemplo de uso lo puedes ver en la Alarma por láser en Domótica con Arduino

Si quieres saber más de este componente, te recomendamos esta página de Luis Llamas.
Si tienes que comprar uno, es importante que no sea superior a 5mW, pues puede dañar permanentemente la retina del ojo [+info].
El modelo que proponemos es de 1mW, no obstante, EVITA SIEMPRE QUE EL LÁSER APUNTE A LOS OJOS especialmente con niños.

Display LCD
Si queremos visualizar datos de forma independiente del ordenador, existen matrices de led que puedes ver en los cursos de mBot o mClon pero lo mejor es una pantalla Liquid Crystal Display y la mejor forma de conectar esta interfaz es en serie utilizando el protocolo I2C.
Ejemplo de uso :
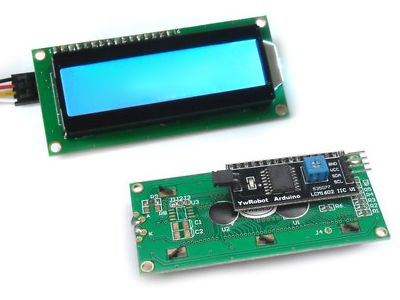
CC-BY-SA Luis Llamas
No confundas Display LCD con matriz de LEDs , o una OLED
Aclarando conceptos: Protocolo I2C
Es un protocolo de emitir los datos con sólo dos cables SDA (los datos) y SCL (reloj) y además pueden compartir varios dispositivos SLAVE) para ello la placa Arduino ESP32, microbit... (MASTER) tiene que saber qué dirección tiene cada dispositivo IMPORTANTE:
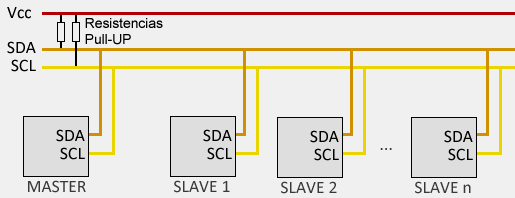
Fuente Luis Llamas ArduinoI2C CC-BY-SA
Aclarando conceptos: Lógica invertida
Igual que vimos en sensores, con las configuraciones Pull up y Pull down, las salidas de cualquier actuador PUEDEN SER LÓGICA INVERTIDA, mira en este NodeMCU (básicamente es un Arduino con wifi, aquí está conectado con el servidor Blynk) como funciona al revés, cuando apretamos, por lo tanto enviamos un uno a la salida, se apaga la salida !!
Objetivos y contenidos
Objetivos
- Capacidad de desarrollar retos STEAM con un amplio nivel educativo: primaria hasta secundaria
- Retos STEAM de nivel principiante con manejo de sensores y actuadores con lenguaje de bloques.
- Retos STEAM de nivel medio medio/avanzado en las comunicaciones Bluetooth.
- Retos STEAM de nivel medio/avanzado con proyectos IoT (Internet de las cosas)
Contenidos
-
¿Qué es Smart Acriculture para micro:bit?
-
Introducción sobre lenguajes, actuadores y sensores
-
Jugando sólo con la placa micro:bit con lenguaje por bloques Makecode
- Jugando con la maqueta y lenguaje por bloques Makecode
-
Jugando con Bluetooth
-
Jugando con IoT