Sensor de distancia de ultrasonidos
¿Qué es el sensor de distancia HC-SR04?
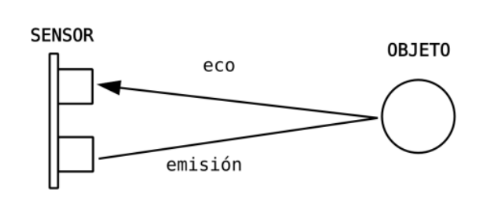
Es un sensor digital de distancias por ultrasonidos capaz de detectar objetos y calcular la distancia a la que se encuentra en un rango de 2 a 350 cm. Su uso es tan sencillo como enviar el pulso de arranque y medir la anchura del pulso de retorno.
No es un sensor preciso, con una ligera inclinación de la superficie ya da lecturas erróneas pero es muy barato
El más común es el HC-SR04 que tiene 4 pines de conexión: VCC Trig (Disparo del ultrasonido) Echo (Recepción del ultrasonido) y GND aunque en algunos modelos como el de Elecfreaks tiene 3 pines. Integra Trig y Echo en uno sólo.
La distancia se calcula con esta fórmula:
Distancia en cm = {(Tiempo en segundos entre Trig y el Echo) * (V.Sonido 34000 en cm/s)} / 2
Si programas en código, tienes que utilizar la fórmula anterior, previamente tienes que programar el cálculo del tiempo entre una emisión de un pulso en Trg y la respuesta en Echo.
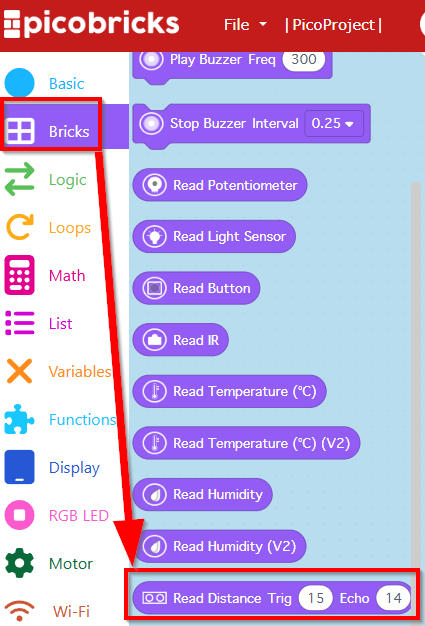
Si utilizas la programación en bloques, no es necesario, seguro que hay un bloque que lo hace todo por ti 😍
Ejemplos de uso:
- Alarma en Domótica con Arduino
- Piano invisible en Arduino con ArduinoBlocks,
- Sensor parking en Arduino con ArduinoBlocks
- Piano invisible en Arduino con mBlock
- Sensor parking en Arduino con mBlock
- Sensor de distancia de ultrasonidos con Picobricks
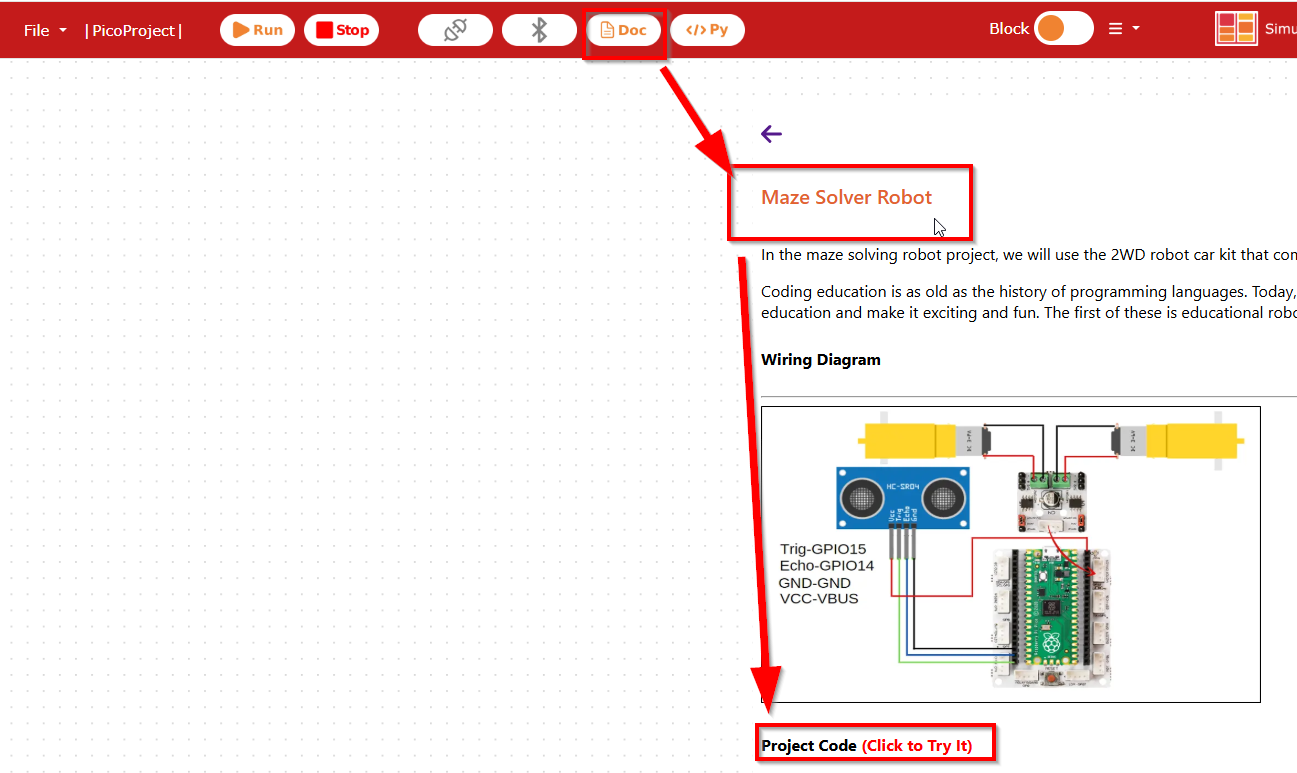
Conexión con la Raspberry Pi Pico E
Si miras https://libros.catedu.es/books/pico-bricks/page/que-es-pico-bricks verás el esquema para poder conectar los pines del HC-SR04 con la Raspberry, te lo mostramos aquí
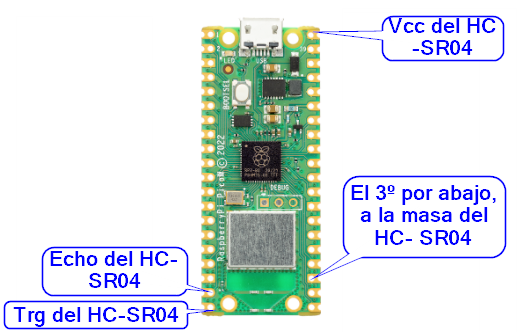
La conexión de Echo y de Trg es arbritaria, lo hemos puesto en GP14 y GP15 que es la que recomienda el programa Picobricks
Enunciado
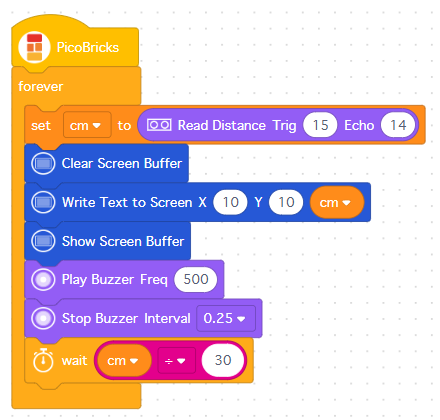
Mostrar por la pantalla de OLED la distancia y a la vez que suene un radar como en los asistentes de parking de los coches
Programa
Para hacer el pitido intermitente en función de los centímetros del objeto, se utiliza una pausa, como la espera en cm convertirla a segundos es muy grande, se divide por 30, puedes modificar este valor a tu gusto
Resultado
Te atreves a... Juntar el Pico coche con un sensor de distancia de tal manera que vaya autónomo evitando los obstáculos como un romba
¿No te atreves? Pues aquí tienes la solución:
No comments to display
No comments to display