Sensor ultrasonidos
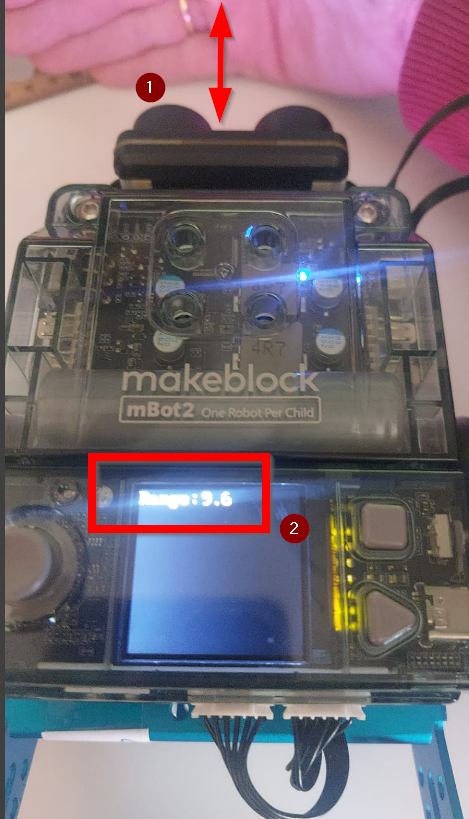
Medición de distancia
import cyberpi,mbuild
cyberpi.display.show_label("Range:", 16, 0, 0, index = 0)
while True:
range = mbuild.ultrasonic2.get(index = 1)
cyberpi.display.show_label(range, 16, 50, 0, index = 1)Extraído de https://github.com/PerfecXX/Python-mBot2/blob/main/README.md licencia MIT
Podemos experimentar que es bastante preciso, más que en mBot1
Este código haría lo mismo pero alarmando que hay obstáculo o no
import cyberpi,mbuild
cyberpi.display.show_label("Range:", 16, 20, 0, index = 0)
while True:
range = mbuild.ultrasonic2.get(index = 1)
cyberpi.display.show_label(range, 16, 70, 0, index = 1)
if range < 10:
cyberpi.led.on(255,0,0,id="all")
cyberpi.display.show_label("Obstacle!", 16, 0, 20, index = 2)
else:
cyberpi.led.on(0,255,0,id="all")
cyberpi.display.show_label("No Obstacle", 16, 0, 20, index = 2)Extraído de https://github.com/PerfecXX/Python-mBot2/blob/main/README.md licencia MIT
No comments to display
No comments to display