Evitar obstáculos II
El contenido de esta página es de
Acuérdate que para manejar el sensor de distancia, hay que instalar la extensión correspondiente. Ver https://libros.catedu.es/books/cyberpi-y-mbot2/page/como-usar-mbot2-en-mblock
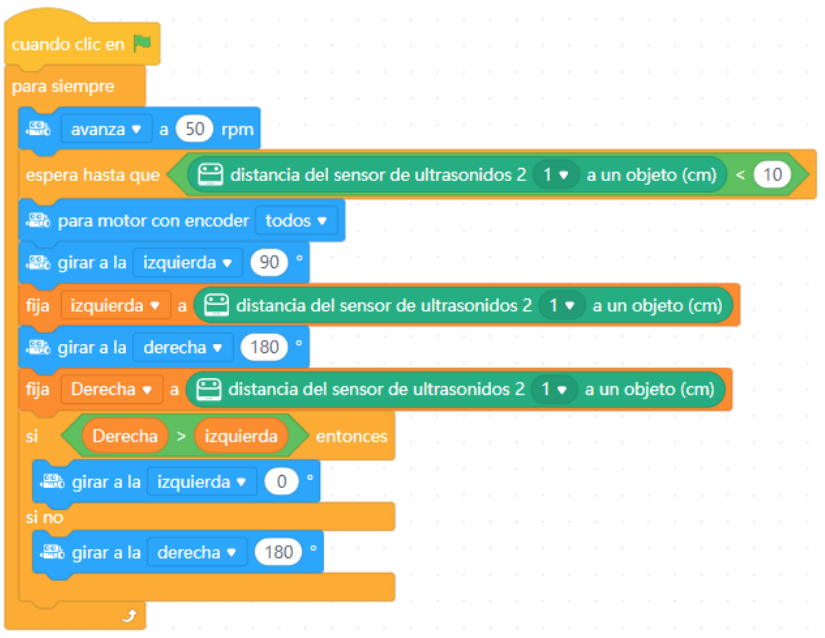
Ahora, en vez de elegir al azar como Evitar obstáculos I qué dirección a girar, en este caso vamos a realizar un proyecto en el cual nuestro mBot2 tiene que detectar un objeto cuando esté a menos de 10 cm. En este momento se tiene que para y comprobar la distancia que hay a su derecha y la distancia que hay a su izquierda, siempre tendrá que ir por la dirección donde el obstáculo está más lejos. 
RESULTADO
No comments to display
No comments to display