1.2 Motores
Los motores son de corriente continua sin control de su posición, es decir, sólo podemos controlar su sentido de giro y su potencia.

El control de los motores implicará poner en el escudo Protoboard dos circuitos integrados y su cableado correspondiente, vamos a verlo:
1.2.1.- Driver motor B6612FNG
Para realizar el control de los motores, tanto su potencia como su sentido de giro se va a utilizar el controlador TB6612FNG
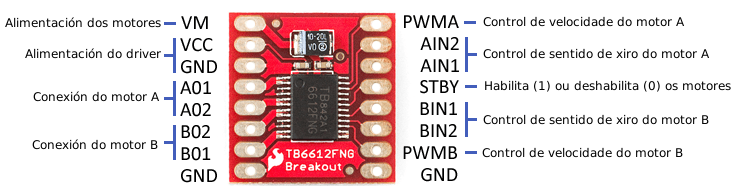
Fuente: https://mclon.org/ Maria L CC-BY-SA
La potencia de los motores se controla por los pines PWMA y PWMB indicando un valor entre 0 y 255.
1.2.2.- Los giros, una complicación más: 7404
Los giros se controlan con los pines AIN, por ejemplo para el motor A :
| GIRO MOTOR | AIN1 | AIN2 |
| CLOCKWISE (sentido agujas del reloj) | 0 | 1 |
| ANTICLOCKWISE (contrario) | 1 | 0 |
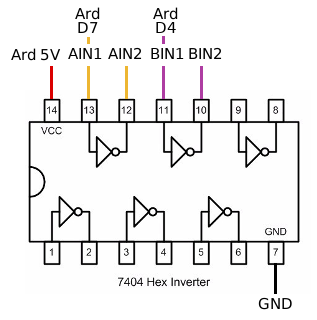
Para no gastar dos pines del Arduino para esta función, un truco consiste en gastar sólo uno, y el otro que sea el inverso de ese mismo. Ese truco es lo que utiliza mBot y si queremos compatibilidad mClon y mBot tenemos que hacerlo.
Pero esto implica tener que utilizar un circuito impreso más, el 7404 que tiene 4 inversores :
1.2.3.- Otra opción para los giros
Tal y como dice la página https://tecnoloxia.org/mclon/robotica/o-control-dos-motores/ también se puede utilizar dos transistores y resistencias, (de echo, mBot lo hace así) pero no lo utilizaremos, pues pensamos que es más cómodo el 7404.
No comments to display
No comments to display