3.3 Cableado esquema
Este es la parte más difícil !!!
Tenemos que conseguir unir los diferentes elementos con los pines del nanoArduino:
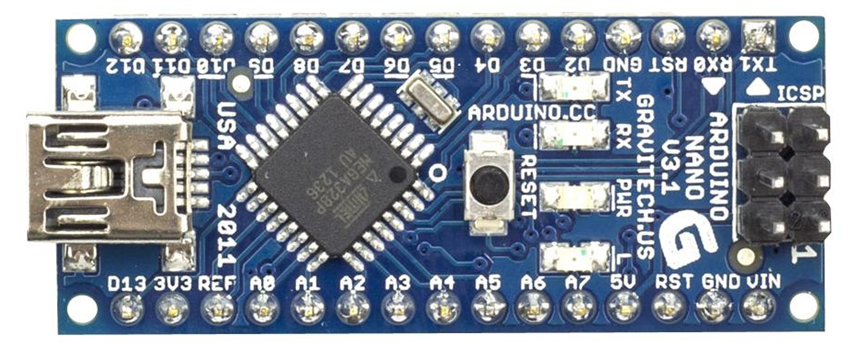
- Los pines digitales D0,D1,D2,D3,D4,D5,D6,D7,D8,D9,D10,D11,D12,D13
- Los pines analógicos A0,A1,A2,A3,A4,A5,A6,A7
- Los pines de alimentación GND, VIN
Y tienen que ser estas conexiones y no otras para que sea compatible con mBlock y mBot Ver planos de mBot :
3.3.1.- Tabla de conexiones
Estas son las conexiones al nanoArduino
| PIN | ELEMENTO |
| A0 | |
| A1 | |
| A2 | |
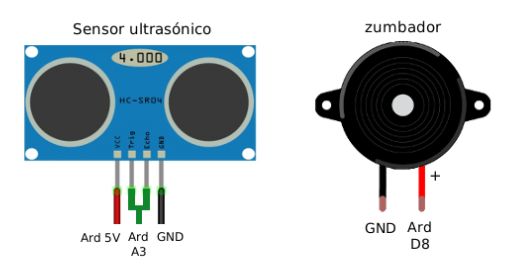
| A3 | PINES ECHO Y TRG DEL SENSOR DE ULTRASONIDOS |
| A4 | |
| A5 | |
| A6 | LDR |
| A7 | PULSADOR |
| D1 | |
| D2 | |
| D3 | |
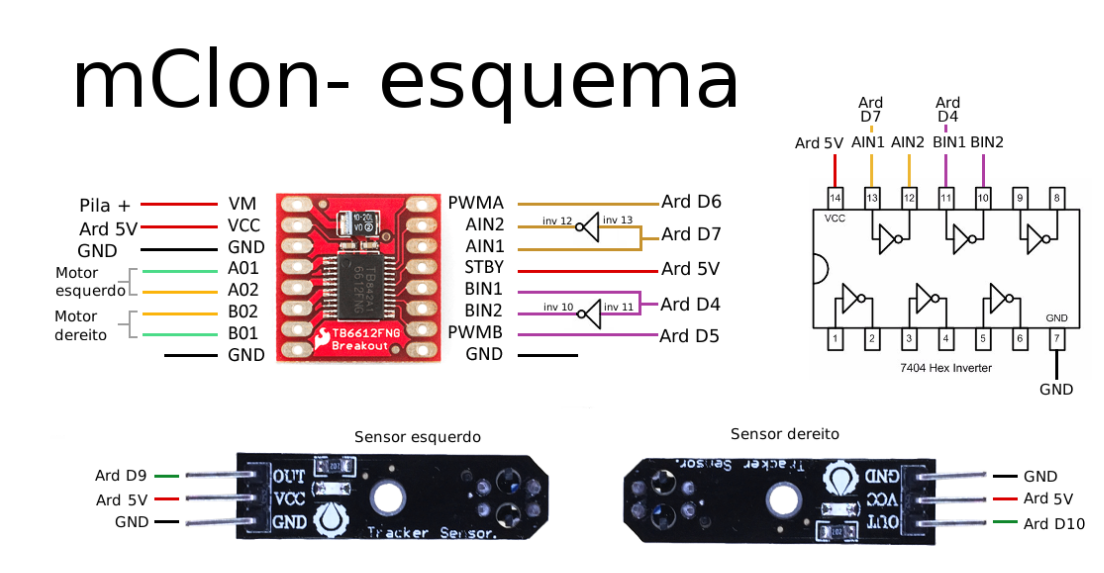
| D4 | Pin BIN1 del driver B6612FNG y en pin 11 del 7404 |
| D5 | Pin PWMB del driver B6612FNG |
| D6 | Pin PWMA del driver B6612FNG |
| D7 | Pin AIN1 del driver B6612FNG y en pin 13 del 7404 |
| D8 | BUZZER |
| D9 | SENSOR IZQUIERDO SIGUELINEAS |
| D10 | SENSOR DERECHO SIGUELINEAS |
| D11 | SERVO DEL BRAZO ROBOT |
| D12 | |
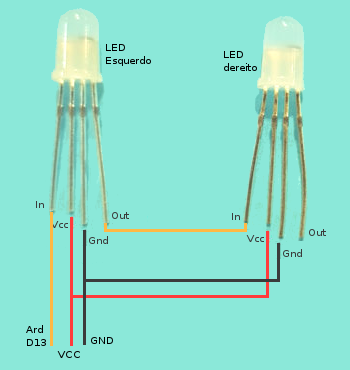
| D13 | LEDS RGB |
Fuente: https://mclon.org Maria L CC-BY-SA
Fuente: https://mclon.org Maria L CC-BY-SA

3.3.3 Esquema accesorios
Los dos leds RGB
Fuente: https://mclon.org Maria L CC-BY-SA
El servo del brazo:

Fuente: https://mclon.org Maria L CC-BY-SA
El LDR :
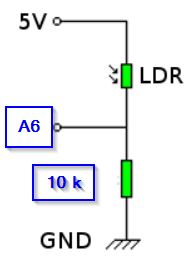
Fuente: Adaptado de https://mclon.org Maria L CC-BY-SA
No comments to display
No comments to display