Arduino IDE con IoT: Coche teledirigido
Aprovechamos el programa que enciende y apaga un led por Arduino Cloud
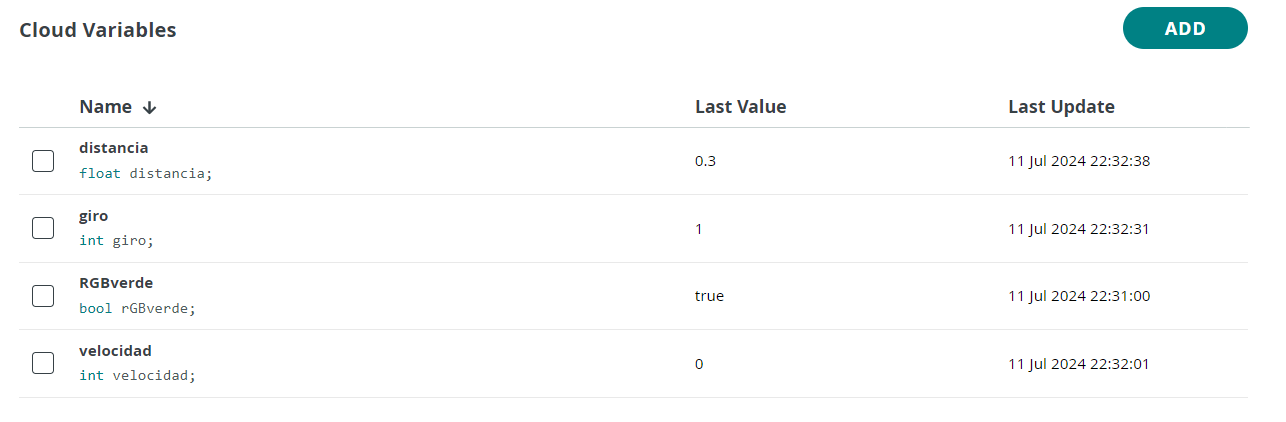
Variables
Le añadimos tres variables más :
- velocidad tipo entero Read&Write
- giro tipo entero Read&Write
- distancia tipo float Read
Sketch
En thingProperties.h añade automáticamente estas variables y funciones, no tienes que añadirlas :
void onGiroChange();
void onVelocidadChange();
void onRGBverdeChange();
float distancia;
int giro;
int velocidad;
bool rGBverde;Pero en la función principal, nosotros vamos a poner el siguiente código :
- Línea 2 #include "Arduino_Alvik.h" para que incluya la libería de manejo del robot
- Línea 4 Creamos un objeto alvik Arduino_Alvik alvik;
- Línea 6 Creamos una variable tipo array de 5 elementos para almacenar las distancias que lee el sensor de distancia float distances[5];
- Línea 15 arrancamos el objeto alvik alvik.begin();
- Línea 41 que el alvik se mueva según la velocidad y el giro alvik.drive(velocidad,giro);
- Es la instrucción principal y qué sencilla 😍
- Línea 42 leemos el array de distancias alvik.get_distance(distances[0], distances[1], distances[2], distances[3], distances[4]);
- Línea 43 de todas las distancias, sólo nos importa la 2 distancia=distances[2];
Nota: la instrucción 41 se han colocado dentro de loop() pero también se podría haber colocado dentro de onGiroChange();
onVelocidadChange();
#include "thingProperties.h"
#include "Arduino_Alvik.h"
Arduino_Alvik alvik;
float distances[5];
void setup() {
// Initialize serial and wait for port to open:
Serial.begin(9600);
// This delay gives the chance to wait for a Serial Monitor without blocking if none is found
delay(1500);
alvik.begin();
// Defined in thingProperties.h
initProperties();
// Connect to Arduino IoT Cloud
ArduinoCloud.begin(ArduinoIoTPreferredConnection);
/*
The following function allows you to obtain more information
related to the state of network and IoT Cloud connection and errors
the higher number the more granular information you’ll get.
The default is 0 (only errors).
Maximum is 4
*/
setDebugMessageLevel(2);
ArduinoCloud.printDebugInfo();
/// MI CODIGO
pinMode(D13,OUTPUT);
}
void loop() {
ArduinoCloud.update();
// Your code here
alvik.drive(velocidad,giro);
alvik.get_distance(distances[0], distances[1], distances[2], distances[3], distances[4]);
distancia=distances[2];
}
/*
Since RGBverde is READ_WRITE variable, onRGBverdeChange() is
executed every time a new value is received from IoT Cloud.
*/
void onRGBverdeChange() {
// Add your code here to act upon RGBverde change
if (rGBverde){
digitalWrite(D13,HIGH);
}else{
digitalWrite(D13,LOW);
}
}
/*
Since RGBrojo is READ_WRITE variable, onRGBrojoChange() is
executed every time a new value is received from IoT Cloud.
*/
void onRGBrojoChange() {
// Add your code here to act upon RGBrojo change
}
/*
Since Velocidad is READ_WRITE variable, onVelocidadChange() is
executed every time a new value is received from IoT Cloud.
*/
void onVelocidadChange() {
// Add your code here to act upon Velocidad change
}
/*
Since Giro is READ_WRITE variable, onGiroChange() is
executed every time a new value is received from IoT Cloud.
*/
void onGiroChange() {
// Add your code here to act upon Giro change
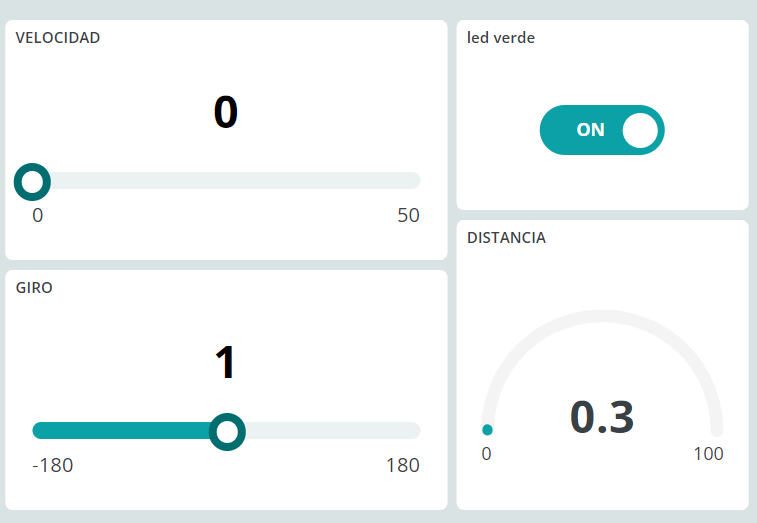
}Dashboard
Creamos un panel de control con:
- Un slider para velocidad de 0 a 50
- Un slider para el giro de -180 a +180
- Un gauge para distancia
No comments to display
No comments to display