Manejando servos
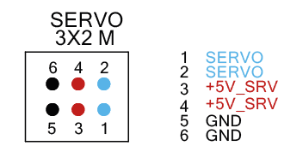
Conexión
Se pueden conectar hasta dos servos, el A es el de arriba y el B es el de abajo
La api set_servo_positions
Nos permite controlar estos dos servos indicando el primer argumento el ángulo (0-180) del A y en el segundo el del B set_servo_positions(a_position: int, b_position: int)
Programa
Extraído de https://docs.arduino.cc/tutorials/alvik/user-manual/#add-servo-motors
from arduino_alvik import ArduinoAlvik
import time
alvik = ArduinoAlvik()
alvik.begin()
while True:
alvik.set_servo_positions(0,0)
time.sleep(2)
alvik.set_servo_positions(90,180)
time.sleep(2)
alvik.set_servo_positions(180,90)
time.sleep(2)
alvik.set_servo_positions(90,0)
time.sleep(2)
No comments to display
No comments to display