Sigue líneas
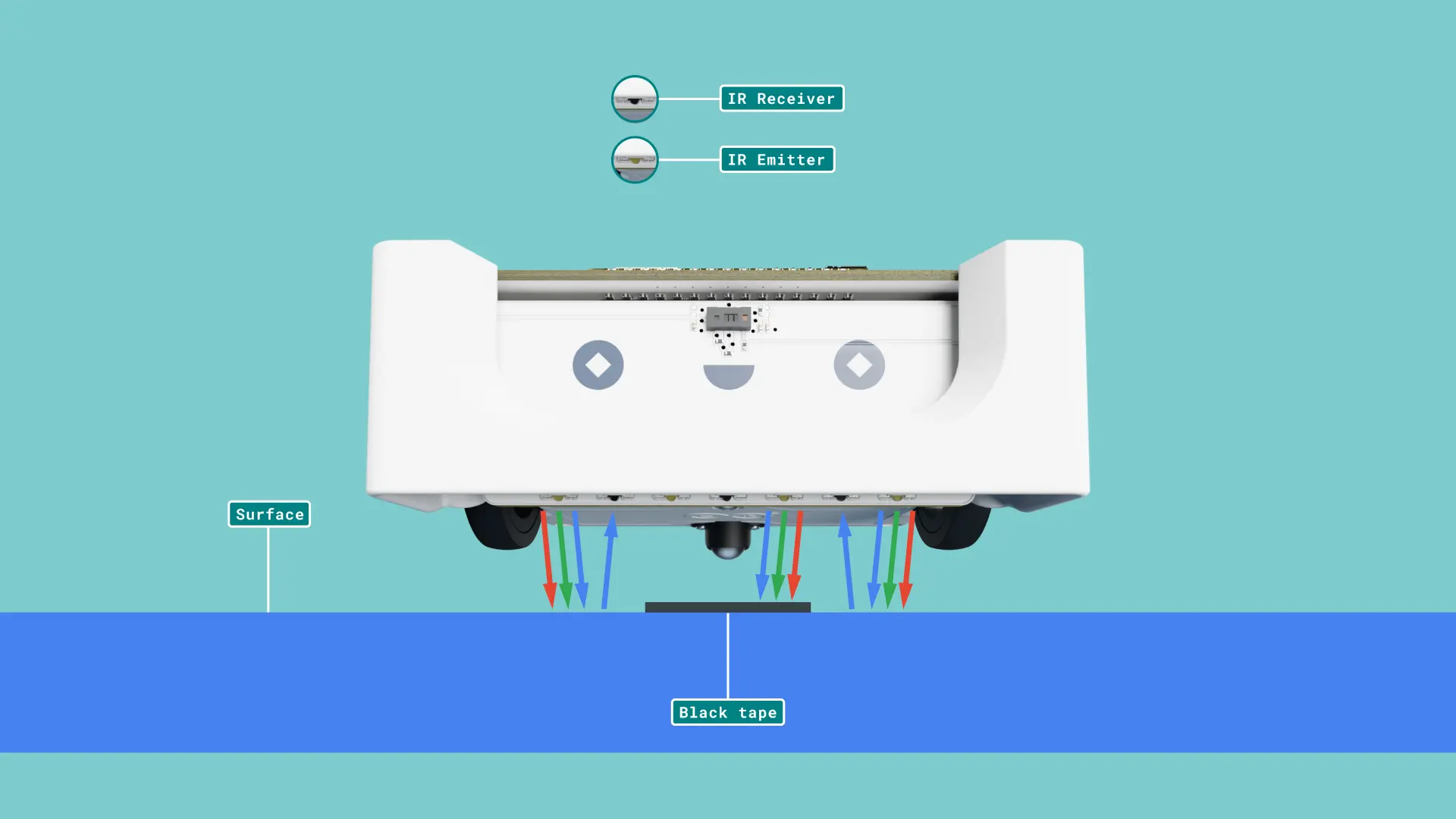
Vamos a crear un programa SIGUE LÍNEAS. El objetivo es que el robot ALVIK sea capaz de seguir cualquier trazado de líneas utilizando sus sensores IR
 Fuente https://docs.arduino.cc/tutorials/alvik/getting-started/ AuthorJose Gracia CC-BY-SA
Fuente https://docs.arduino.cc/tutorials/alvik/getting-started/ AuthorJose Gracia CC-BY-SA
Para poder conseguirlo simplemente tendremos que establecer distintas condiciones de que hacer dependiendo de que sensor del robot detecta el trazado negro.
En este programa también hemos hecho que el robot nos trasmita los valores de los distintos sensores y que el usuario pueda interrumpir el proceso (todo suponiendo que el robot está conectado al equipo).
from arduino_alvik import ArduinoAlvik
from time import sleep
import sys
alvik = ArduinoAlvik()
alvik.begin()
sleep(5)
#VELOCIDAD DEL ROBOT
base_speed = 30
#IMPRIMIR VALORES DE LOS SENSORES
while True:
try:
ir_left, ir_center, ir_right = alvik.get_line_sensors()
print(ir_left, ir_center, ir_right)
sleep(0.01)
#Condiciones de giro, avance y parar
if ir_center > 300:
alvik.set_wheels_speed(base_speed, base_speed)
elif ir_left > 300:
alvik.set_wheels_speed(0, base_speed)
elif ir_right > 300:
alvik.set_wheels_speed(base_speed, 0)
else:
alvik.set_wheels_speed(0, 0)
#INTERRUPCION DEL USUARIO
except KeyboardInterrupt as e:
print('over')
alvik.stop()
sys.exit()No va muy preciso, el código es mejorable:
- Si la raya es fina, no avanza
- Si la raya no es negra no avanza
- La velocidad 30 es baja
- El margen límite 300 es demasiado generoso que hace que pueda quedarse quieto por detectar todo blanco (ver el final del vídeo)
Más preciso (agradecimientos a Mario Monteagudo Alda CP Ejea)
from arduino import *
from arduino_alvik import ArduinoAlvik
alvik = ArduinoAlvik()
def setup():
alvik.begin()
delay(1000)
def loop():
global base, iteracion
iz, ce, de = alvik.get_line_sensors()
error = ((1*iz+2*ce+3*de)/(iz+ce+de))-2
if ((ce > 400) and (de > 400)):
alvik.left_led.set_color(1, 1, 0)
alvik.right_led.set_color(1, 1, 0)
base = 0
ajuste = 30
iteracion = 25
elif ((ce > 400) and (iz > 400)):
alvik.left_led.set_color(1, 1, 0)
alvik.right_led.set_color(1, 1, 0)
base = 0
ajuste = -30
iteracion = 25
elif (abs(error) < 0.75) and (iteracion == 0):
alvik.left_led.set_color(0, 0, 1)
alvik.right_led.set_color(0, 0, 1)
base = 60
ajuste = 25 * error + 40 * error * abs(error) + 80 * error * error * error
elif (abs(error) < 0.75):
alvik.left_led.set_color(0, 1, 0)
alvik.right_led.set_color(0, 1, 0)
base = 40
ajuste = 20 * error + 40 * error * abs(error) + 80 * error * error * error
iteracion = iteracion -1
elif error > 0:
alvik.left_led.set_color(1, 0, 0)
alvik.right_led.set_color(1, 0, 0)
base = 0
ajuste = 60
iteracion = 25
else:
alvik.left_led.set_color(1, 0, 0)
alvik.right_led.set_color(1, 0, 0)
base = 0
ajuste = -60
iteracion = 25
veIz = base + ajuste
veDe = base - ajuste
alvik.set_wheels_speed(veIz,veDe)
delay(50)
def cleanup():
alvik.stop()
base = 40
iteracion = 0
start(setup, loop, cleanup)Autor Mario Monteagudo Alda CP Ejea
No comments to display
No comments to display