Control de Motores
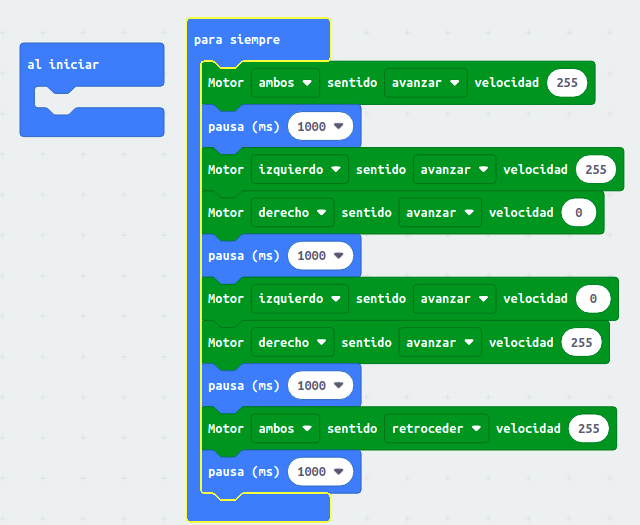
Se trata que el robot haga la siguiente secuencia de movimiento de forma indefinida:
- Adelante durante 1 segundo.
- Derecha durante 1 segundo.
- Izquierda durante 1 segundo.
- Atrás durante 1 segundo.
Se trata que el robot haga la siguiente secuencia de movimiento de forma indefinida:
No comments to display
No comments to display